ODrive踩坑(四)AS5047P-SPI绝对值磁编码器,不需每次上电校准无刷电机,直接上电可用_绝对值码盘测量芯片-程序员宅基地
技术标签: ODrive伺服电机控制器 硬件 BLDC 电机 FOC
前几篇介绍了ODrive在Windows下的使用环境搭建,以及TLE5012B、AS5047P的ABI配置。
ODrive教程资源导航
ODrive踩坑(一)windows下使用环境的搭建,odrivetool及USB驱动的安装
ODrive踩坑(二)3508电机和TLE5012B磁编码器参数配置、校准、位置闭环模式转动电机(TLE5012B - ABI)
ODrive踩坑(四)AS5047P-SPI绝对值磁编码器,不需每次上电校准无刷电机,直接上电可用
ODrive踩坑(五)驱动云台电机、低齿槽转矩电机实现高精度定位
苦于使用 ABI编码器,每次上电都要编码器校准,电机左转一圈再右转一圈。浪费时间不说,运动过程还可能导致工件误触,导致上电意外。如果想要设备上电不经过编码器校准,通电后直接就能用,可能要用到 SPI绝对值编码器。
ODrive 支持两种类型的 SPI绝对值编码器:
- CUI 协议:兼容 AMT23xx 系列 (AMT232A, AMT232B, AMT233A, AMT233B)。
- AMS 协议:兼容 AS5047P 和 AS5048A。
(注意:ODrive 并不支持 TLE5012B 的SPI接口,仅能使用它的 ABI)
1、ODrive连接AS5047P,电机安装
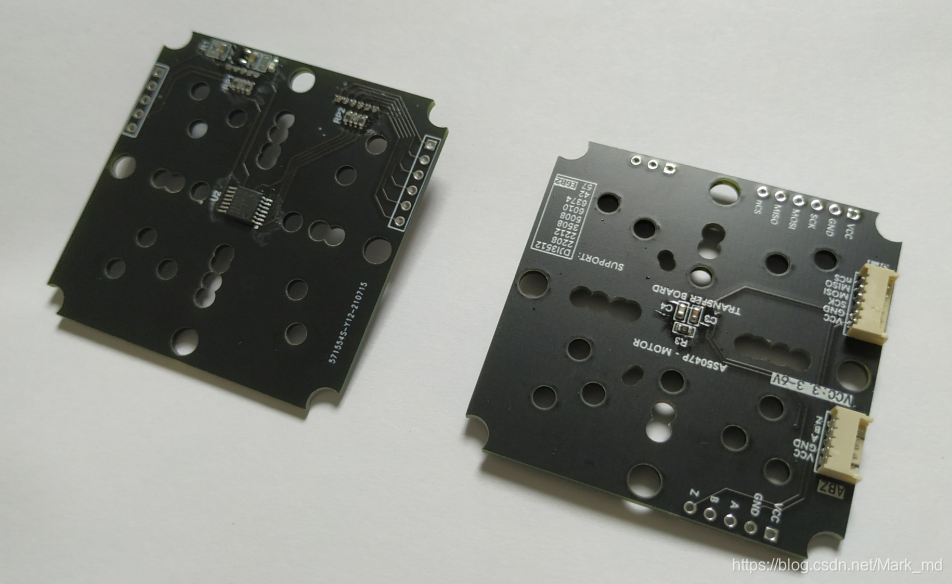
为了方便测试 AS5047P-SPI绝对值编码器,也便于扩展不同的电机,就有了下面这块万能转接板,支持 2208、2212、3508、5008、6010、6374、42步进、57步进 等不同电机的定位安装。
图中AS5047P转接板购买链接,我的淘宝小店:AS5047P SPI磁编码器 3206云台无刷电机 带径向磁铁 Odrive电机
店铺详情内有安装孔位、原理图、教程、资料,手机端可能因没做适配看不到,建议用电脑打开。


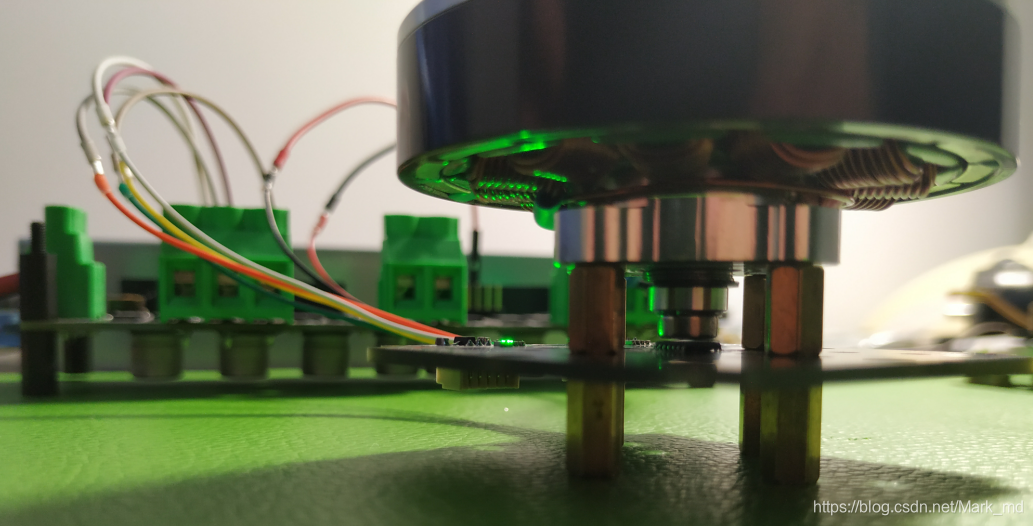
将电机与磁编码器正确安装,强磁与AS5047P芯片的间距不建议超过 3mm。手册中建议值为 0.5~3mm。
电机的型号与第(二)章的不同,但极对数还是 7对,其他参数也基本一致。
测试使用与 DJI3508相同的 PID参数,控制效果竟比原来要好不少。
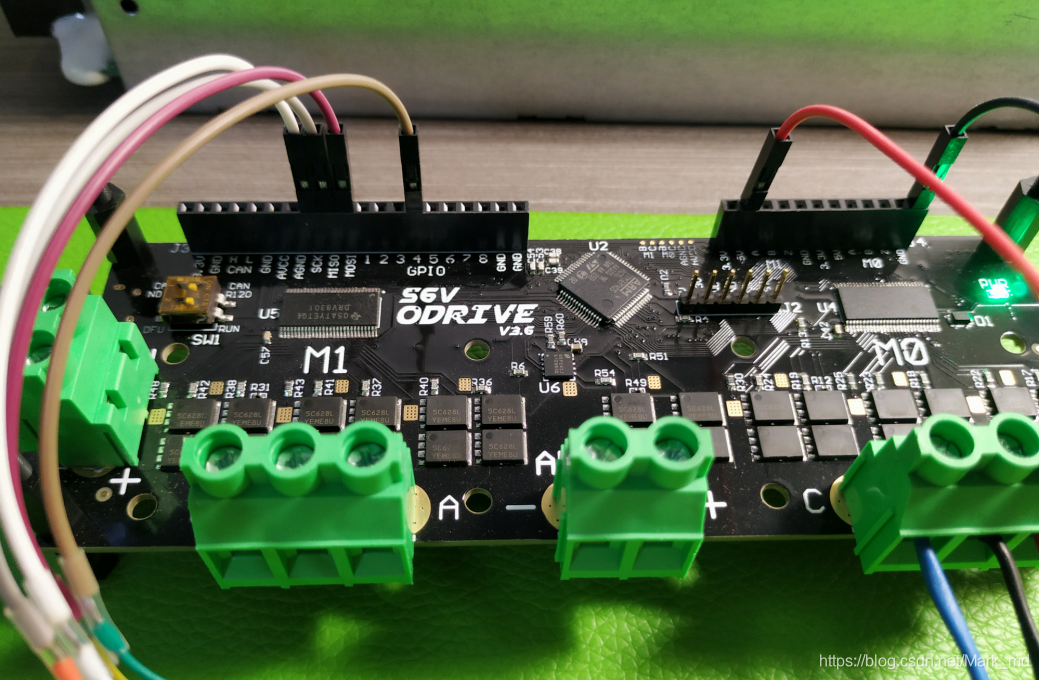
连接 SPI接口,SCK、MISO、MOSI 一一对应,CS插到 ODrive 的4脚。
2、ODrive连接电脑,进行电机校准前的配置
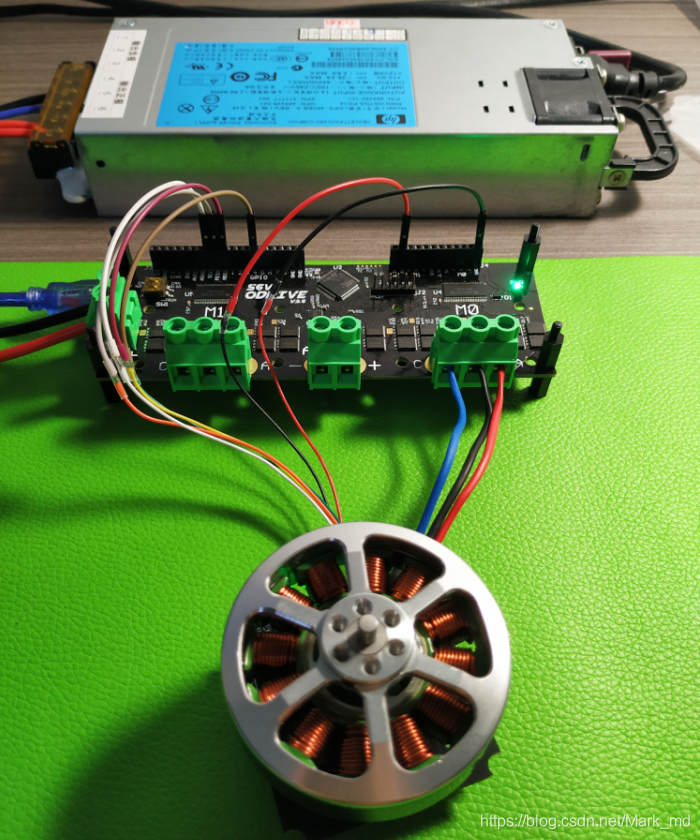
将系统上电,ODrive连接电脑。
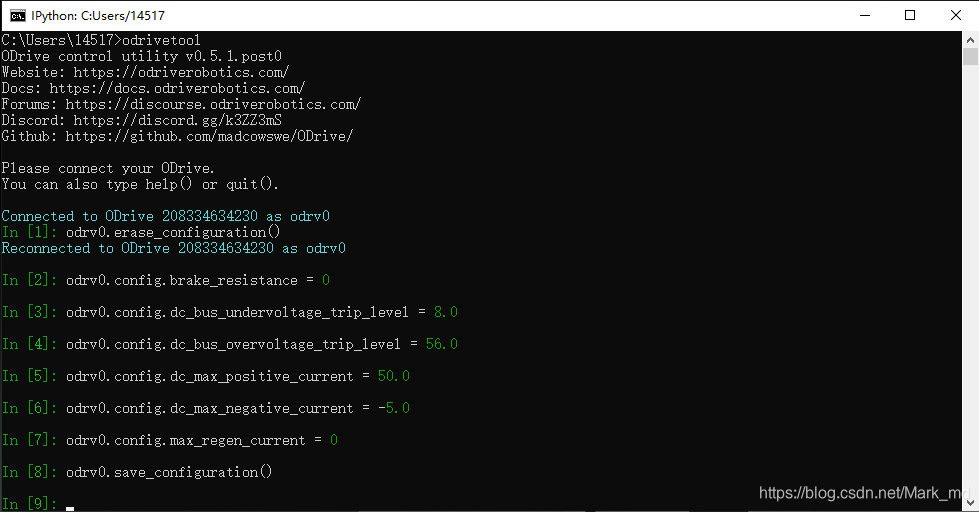
2.1、恢复出厂配置
# 恢复出厂配置
odrv0.erase_configuration()
2.2、配置主板参数
- 限制参数主要用于保护主板、电机不会受损,包括最大电流、保护电压等参数。
- 根据自己适配的电机,酌情调整大小。
# 配置AUX接口上的制动电阻值(常见的为0.47、2.0Ω),如没接则配置为0
odrv0.config.brake_resistance = 0
# 配置低压保护阈值(V)
odrv0.config.dc_bus_undervoltage_trip_level = 8.0
# 配置高压保护阈值(V)
odrv0.config.dc_bus_overvoltage_trip_level = 56.0
# 配置过流保护阈值(A)
odrv0.config.dc_max_positive_current = 50.0
# 配置反向电流阈值(电机制动产生的反向电流)(A)
odrv0.config.dc_max_negative_current = -5.0
# 配置回充电流值(根据供电电池的参数配置,开关电源供电配置为0)(A)
odrv0.config.max_regen_current = 0
# 保存参数
odrv0.save_configuration()
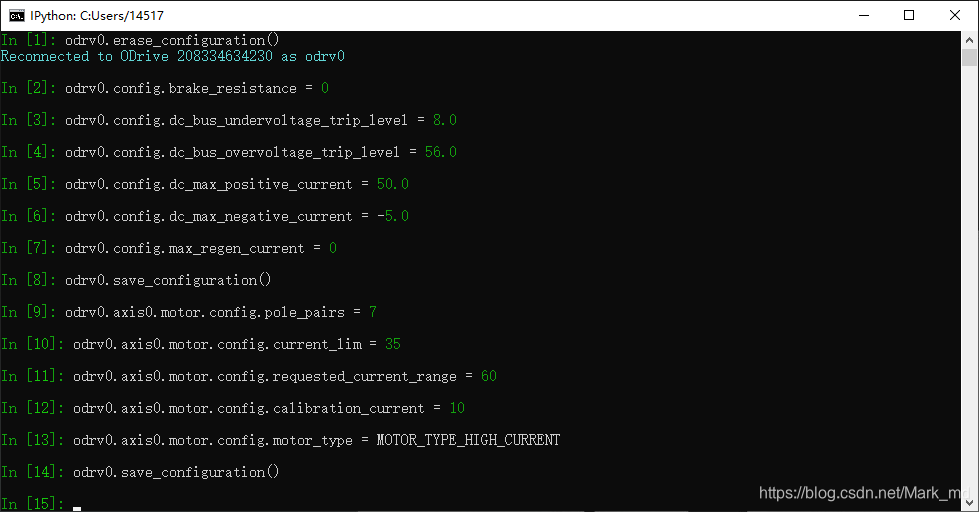
2.3、配置电机参数
# 配置电机0极对数,根据博客开篇的介绍,自己去数磁极个数,然后/2
odrv0.axis0.motor.config.pole_pairs = 7
# 配置电机0的限制电流(A)
odrv0.axis0.motor.config.current_lim = 35
# 配置电机0的电流采样阈值(A)
odrv0.axis0.motor.config.requested_current_range = 60
# 配置电机0校准时的电流阈值(根据自己电机的负载状况酌情配置)(A)
odrv0.axis0.motor.config.calibration_current = 10
# 配置电机0类型。
# 目前支持两种电机:大电流电机(MOTOR_TYPE_HIGH_CURRENT)和云台电机(MOTOR_TYPE_GIMBAL)
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_HIGH_CURRENT
# 保存参数
odrv0.save_configuration()
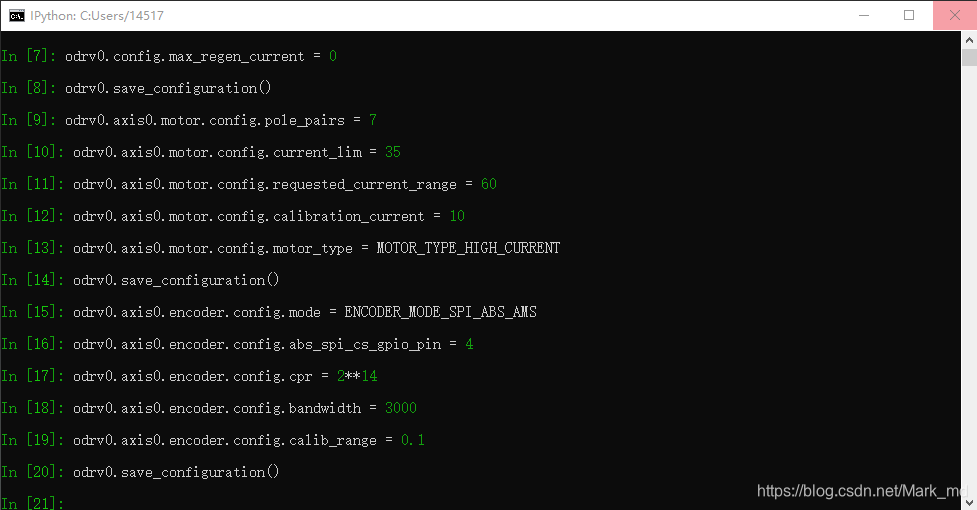
2.4、配置编码器参数
# 配置电机0编码器类型。ENCODER_MODE_INCREMENTAL 使用的是ABI正交(增量)编码器。
# 值 ENCODER_MODE_SPI_ABS_AMS 使用AMS磁编码器-AS5047/AS5048。
odrv0.axis0.encoder.config.mode = ENCODER_MODE_SPI_ABS_AMS
# 设置CSn片选的引脚,ODrive J3接口GPIO3-8任选一个作为CS,这里我使用GPIO4
odrv0.axis0.encoder.config.abs_spi_cs_gpio_pin = 4
# 配置电机0编码器CPR(每转一圈,编码器的计数),AS5047P的最大分辨率为14位
odrv0.axis0.encoder.config.cpr = 2**14
# 编码器带宽设置,CPR值越高带宽设置的也越高
odrv0.axis0.encoder.config.bandwidth = 3000
# 编码器精度,类型为 [float],单位为 [圆周角度∠] (这个值可以适当的大一些,避免环境干扰)
# 电机实际转动角度和开环移动距离之间允许的最大误差,超过此误差将报错ERROR_CPR_OUT_OF_RANGE。
odrv0.axis0.encoder.config.calib_range = 10
# 保存参数
odrv0.save_configuration()
如果因编码器精度误差,而导致失步,会使 ODrive 报错不运行。
建议将odrv0.axis0.encoder.config.calib_range调大,尤其是磁编码器,避免因环境干扰出现误差。(AS5047P的手册对器件的精度描述为±0.1°,故odrv0.axis0.encoder.config.calib_range的值最小不能小于0.1)
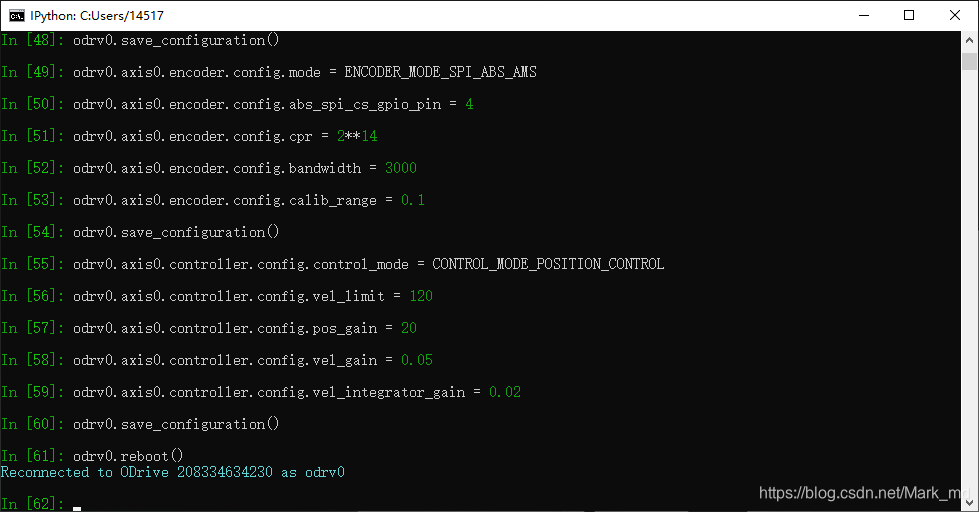
2.5、配置控制器参数(位置闭环模式、配置PID参数)
# 配置电机0控制模式,为位置闭环控制
odrv0.axis0.controller.config.control_mode = CONTROL_MODE_POSITION_CONTROL
# 配置电机0最大转速(转/秒)(电机kv值 * 电压 / 60)
odrv0.axis0.controller.config.vel_limit = 120
# 配置位置环增益:20
odrv0.axis0.controller.config.pos_gain = 20
# 配置速度环增益:0.05
odrv0.axis0.controller.config.vel_gain = 0.05
# 配置积分增益:0.02
odrv0.axis0.controller.config.vel_integrator_gain = 0.02
# 配置输入模式为:梯形轨迹模式
odrv0.axis0.controller.config.input_mode = INPUT_MODE_TRAP_TRAJ
# 配置梯形模式下的电机转速阈值(转/秒)
odrv0.axis0.trap_traj.config.vel_limit = 50
# 配置梯形运动模式下的加速加速度
# 数值大小影响动作跟随效果,大则跟随快;小则跟随慢。
odrv0.axis0.trap_traj.config.accel_limit = 10
# 配置梯形运动模式下的减速加速度
# 数值大小影响动作跟随效果,大则跟随快;小则跟随慢。
odrv0.axis0.trap_traj.config.decel_limit = 10
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
上述配置完成后,会重启控制器,留意最后一条指令。
三、电机和编码器校准
使用 AS5047-SPI绝对值磁编码器 最大的好处,就是可以不用上电后运动校准。只要校准过一次,以后便可直接上电使用,缩短了上电到正常工作的时间,也避免了校准过程对驱动部件的影响。
注意:以下操作请务必按照规定的顺序执行,不然很容易造成校准后电机不能进入闭环,或者电机在重新启动后不能自动进入闭环。AS5047P-SPI磁编码器最难配置,也最容易出错的地方就在校准的步骤,其中试验了好几十次,基本是差了几步顺序就会导致重启后不能正常进入闭环。请务必按照以下操作进行!!!
注意:如有重启后不能自动进入闭环、或者电机参数校准出错 的现象,请断电重启后重试。我的设备有时必须断电重启才可用,reboot命令的重启不管用。(用odrv0.axis0.error查询是否出错)
下面三种配置方法,建议依次顺序试验一次。可以只选择一种进行设置,但按顺序来一般不会有错。
3.1 每次上电后都自动校准编码器 的配置方法
这种方式的运行现象与 ABI接口的一致,每次上电后都自动左转一圈右转一圈,自动进行编码器校准。
# 进行电机参数校准(运行后电机会发出哔~的一声)
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
# 设置电机预校准。(不用每次上电都哔~的一声)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.motor.config.pre_calibrated = True
# 进行编码器校准(运行后,电机会正转一圈再反转一圈)
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
# 查看错误,如果为0,则为无错。否则请断电后重启,重试校准。
odrv0.axis0.error
如校准的第一步无反应,建议先断电重启后重试。
如断电重启后校准仍无效,用 odrv0.axis0.encoder.shadow_count 来测试 AS5047P-SPI磁编码器 是否可以正确读数,如读值始终为0,则说明AS5047P硬件故障或者连线有误,不能进行后续的校准操作。(磁编码器容易配置失败,大多数都是这个问题,读不到值,一直为0)
注意:上面的配置 没有保存参数,有保存参数会让后面的闭环无法运行,不清楚什么原因。下面继续。
之后进入闭环模式,电机会保持位置,用手扭动电机,电机会产生反抗并回到原来位置:
# 配置电机为闭环模式
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
测试运动。电机会按照之前设置的梯形轨迹运行到指定位置:
# 控制电机运行到10圈的位置
odrv0.axis0.controller.input_pos = 10
# 控制电机运行到0圈的位置
odrv0.axis0.controller.input_pos = 0
经过上面的校准后,机器已经能够用AS5047P磁编码器进行闭环控制。
但并不会在重启后自动进入闭环,仍需在重启后手动进入闭环,略有不便。下面设置上电自动校准并闭环运行。
设置为上电自动校准,自动进入闭环。
# 设置ODrive上电启动时,自动校准编码器
odrv0.axis0.config.startup_encoder_offset_calibration = True
# 设置ODrive上电启动时,自动进入闭环模式
odrv0.axis0.config.startup_closed_loop_control = True
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
重启后,就会看到电机右转一圈又左转一圈,自动校准磁编码器。
因为上面设置了 odrv0.axis0.motor.config.pre_calibrated = True,会省去上电启动后自动校准电机参数的过程(哔~的一声),节约了一部分启动时间。
3.2 每次上电后,只自动校准电机,不校准编码器
上面的配置是上电后自动校准编码器,不仅导致启动时间变长,也会导致机械部件碰到零件的意外。
这次使用的AS5047P磁编码器,支持一圈内的绝对值定位,相较于普通的ABI正交编码器,可以配置为上电不校准编码器,大大节约了上电启动时间,也避免了运动过程对其他零件的影响。
下面照做一次。如第一步电机校准无反应,重新上电后重试。
# 进行电机参数校准(运行后电机会发出哔~的一声)
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
# 设置ODrive上电启动后,自动校准电机
odrv0.axis0.config.startup_motor_calibration = True
# 进行编码器校准(运行后,电机会正转一圈再反转一圈)
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
# 设置编码器预校准。(不用每次上电都右转一圈又左转一圈)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.encoder.config.pre_calibrated = True
# 关闭ODrive上电启动时,自动校准编码器
odrv0.axis0.config.startup_encoder_offset_calibration = False
# 配置电机为闭环模式
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
# 设置ODrive上电启动时,自动进入闭环模式
odrv0.axis0.config.startup_closed_loop_control = True
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
如果因编码器精度误差,而导致失步,会使 ODrive 报错不运行。
建议将下值调大,尤其是磁编码器,容易受环境干扰出现误差。
(AS5047P的手册对器件的精度描述为±0.1°,故odrv0.axis0.encoder.config.calib_range的值最小不能小于0.1)
# 编码器精度,类型为 [float],单位为 [圆周角度∠]
# 电机实际转动角度和开环移动距离之间允许的最大误差,超过此误差将报错ERROR_CPR_OUT_OF_RANGE。
odrv0.axis0.encoder.config.calib_range = 0.1
odrv0.axis0.encoder.config.calib_range = 10
# 保存参数
odrv0.save_configuration()
3.3 每次上电后,不需任何校准,直接自动进入闭环
在3.2的基础上,继续这样设置:(可能会失败,但用3.2保底,可以避免每次上电都校准编码器)
# 进行电机参数校准(运行后电机会发出哔~的一声)
odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION
# 设置电机预校准。(不用每次上电都哔~的一声)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.motor.config.pre_calibrated = True
# 关闭ODrive上电启动后,自动校准电机
odrv0.axis0.config.startup_motor_calibration = False
# 进行编码器校准(运行后,电机会正转一圈再反转一圈)
odrv0.axis0.requested_state = AXIS_STATE_ENCODER_OFFSET_CALIBRATION
# 设置编码器预校准。(不用每次上电都右转一圈又左转一圈)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.encoder.config.pre_calibrated = True
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
四、错误修复、注意事项
多用odrv0.axis0.error去检错,多用odrv0.axis0.motor、odrv0.axis0.encoder去检查参数。
用odrv0.axis0.encoder.shadow_count可以测试AS5047P-SPI磁编码器能否正常读数。
odrv0.vbus_voltage:检查ODrive的供电电压。
如果你的ODrive无法正常工作,用如下查看错误列表:
dump_errors(odrv0) 查看错误
dump_errors(odrv0, True) 清除错误(如果报错ODrive不会继续执行电机旋转指令)
如需重新对 AS5047P 进行软硬件设计,有以下文章可供参考:
AS5047P磁编码器应用设计大全解:硬件电路设计、SPI通信时序、逻辑波形分析、注意事项
智能推荐
攻防世界_难度8_happy_puzzle_攻防世界困难模式攻略图文-程序员宅基地
文章浏览阅读645次。这个肯定是末尾的IDAT了,因为IDAT必须要满了才会开始一下个IDAT,这个明显就是末尾的IDAT了。,对应下面的create_head()代码。,对应下面的create_tail()代码。不要考虑爆破,我已经试了一下,太多情况了。题目来源:UNCTF。_攻防世界困难模式攻略图文
达梦数据库的导出(备份)、导入_达梦数据库导入导出-程序员宅基地
文章浏览阅读2.9k次,点赞3次,收藏10次。偶尔会用到,记录、分享。1. 数据库导出1.1 切换到dmdba用户su - dmdba1.2 进入达梦数据库安装路径的bin目录,执行导库操作 导出语句:./dexp cwy_init/[email protected]:5236 file=cwy_init.dmp log=cwy_init_exp.log 注释: cwy_init/init_123..._达梦数据库导入导出
js引入kindeditor富文本编辑器的使用_kindeditor.js-程序员宅基地
文章浏览阅读1.9k次。1. 在官网上下载KindEditor文件,可以删掉不需要要到的jsp,asp,asp.net和php文件夹。接着把文件夹放到项目文件目录下。2. 修改html文件,在页面引入js文件:<script type="text/javascript" src="./kindeditor/kindeditor-all.js"></script><script type="text/javascript" src="./kindeditor/lang/zh-CN.js"_kindeditor.js
STM32学习过程记录11——基于STM32G431CBU6硬件SPI+DMA的高效WS2812B控制方法-程序员宅基地
文章浏览阅读2.3k次,点赞6次,收藏14次。SPI的详情简介不必赘述。假设我们通过SPI发送0xAA,我们的数据线就会变为10101010,通过修改不同的内容,即可修改SPI中0和1的持续时间。比如0xF0即为前半周期为高电平,后半周期为低电平的状态。在SPI的通信模式中,CPHA配置会影响该实验,下图展示了不同采样位置的SPI时序图[1]。CPOL = 0,CPHA = 1:CLK空闲状态 = 低电平,数据在下降沿采样,并在上升沿移出CPOL = 0,CPHA = 0:CLK空闲状态 = 低电平,数据在上升沿采样,并在下降沿移出。_stm32g431cbu6
计算机网络-数据链路层_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输-程序员宅基地
文章浏览阅读1.2k次,点赞2次,收藏8次。数据链路层习题自测问题1.数据链路(即逻辑链路)与链路(即物理链路)有何区别?“电路接通了”与”数据链路接通了”的区别何在?2.数据链路层中的链路控制包括哪些功能?试讨论数据链路层做成可靠的链路层有哪些优点和缺点。3.网络适配器的作用是什么?网络适配器工作在哪一层?4.数据链路层的三个基本问题(帧定界、透明传输和差错检测)为什么都必须加以解决?5.如果在数据链路层不进行帧定界,会发生什么问题?6.PPP协议的主要特点是什么?为什么PPP不使用帧的编号?PPP适用于什么情况?为什么PPP协议不_接收方收到链路层数据后,使用crc检验后,余数为0,说明链路层的传输时可靠传输
软件测试工程师移民加拿大_无证移民,未受过软件工程师的教育(第1部分)-程序员宅基地
文章浏览阅读587次。软件测试工程师移民加拿大 无证移民,未受过软件工程师的教育(第1部分) (Undocumented Immigrant With No Education to Software Engineer(Part 1))Before I start, I want you to please bear with me on the way I write, I have very little gen...
随便推点
Thinkpad X250 secure boot failed 启动失败问题解决_安装完系统提示secureboot failure-程序员宅基地
文章浏览阅读304次。Thinkpad X250笔记本电脑,装的是FreeBSD,进入BIOS修改虚拟化配置(其后可能是误设置了安全开机),保存退出后系统无法启动,显示:secure boot failed ,把自己惊出一身冷汗,因为这台笔记本刚好还没开始做备份.....根据错误提示,到bios里面去找相关配置,在Security里面找到了Secure Boot选项,发现果然被设置为Enabled,将其修改为Disabled ,再开机,终于正常启动了。_安装完系统提示secureboot failure
C++如何做字符串分割(5种方法)_c++ 字符串分割-程序员宅基地
文章浏览阅读10w+次,点赞93次,收藏352次。1、用strtok函数进行字符串分割原型: char *strtok(char *str, const char *delim);功能:分解字符串为一组字符串。参数说明:str为要分解的字符串,delim为分隔符字符串。返回值:从str开头开始的一个个被分割的串。当没有被分割的串时则返回NULL。其它:strtok函数线程不安全,可以使用strtok_r替代。示例://借助strtok实现split#include <string.h>#include <stdio.h&_c++ 字符串分割
2013第四届蓝桥杯 C/C++本科A组 真题答案解析_2013年第四届c a组蓝桥杯省赛真题解答-程序员宅基地
文章浏览阅读2.3k次。1 .高斯日记 大数学家高斯有个好习惯:无论如何都要记日记。他的日记有个与众不同的地方,他从不注明年月日,而是用一个整数代替,比如:4210后来人们知道,那个整数就是日期,它表示那一天是高斯出生后的第几天。这或许也是个好习惯,它时时刻刻提醒着主人:日子又过去一天,还有多少时光可以用于浪费呢?高斯出生于:1777年4月30日。在高斯发现的一个重要定理的日记_2013年第四届c a组蓝桥杯省赛真题解答
基于供需算法优化的核极限学习机(KELM)分类算法-程序员宅基地
文章浏览阅读851次,点赞17次,收藏22次。摘要:本文利用供需算法对核极限学习机(KELM)进行优化,并用于分类。
metasploitable2渗透测试_metasploitable2怎么进入-程序员宅基地
文章浏览阅读1.1k次。一、系统弱密码登录1、在kali上执行命令行telnet 192.168.26.1292、Login和password都输入msfadmin3、登录成功,进入系统4、测试如下:二、MySQL弱密码登录:1、在kali上执行mysql –h 192.168.26.129 –u root2、登录成功,进入MySQL系统3、测试效果:三、PostgreSQL弱密码登录1、在Kali上执行psql -h 192.168.26.129 –U post..._metasploitable2怎么进入
Python学习之路:从入门到精通的指南_python人工智能开发从入门到精通pdf-程序员宅基地
文章浏览阅读257次。本文将为初学者提供Python学习的详细指南,从Python的历史、基础语法和数据类型到面向对象编程、模块和库的使用。通过本文,您将能够掌握Python编程的核心概念,为今后的编程学习和实践打下坚实基础。_python人工智能开发从入门到精通pdf