旋转变换(一)旋转矩阵-程序员宅基地
技术标签: Computer Graphics(计算机图形学) 三维 图形
1. 简介
计算机图形学中的应用非常广泛的变换是一种称为仿射变换的特殊变换,在仿射变换中的基本变换包括平移、旋转、缩放、剪切这几种。本文以及接下来的几篇文章重点介绍一下关于旋转的变换,包括二维旋转变换、三维旋转变换以及它的一些表达方式(旋转矩阵、四元数、欧拉角等)。
2. 绕原点二维旋转
首先要明确旋转在二维中是绕着某一个点进行旋转,三维中是绕着某一个轴进行旋转。二维旋转中最简单的场景是绕着坐标原点进行的旋转,如下图所示:
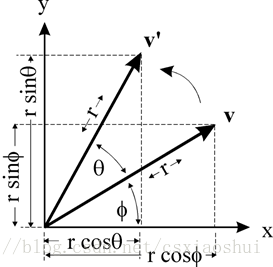
如图所示点v 绕 原点旋转 θ 角,得到点v’,假设 v点的坐标是(x, y) ,那么可以推导得到 v’点的坐标(x’, y’)(设原点到v的距离是r,原点到v点的向量与x轴的夹角是 ϕ )
x=rcosϕy=rsinϕ
x′=rcos(θ+ϕ)y′=rsin(θ+ϕ)
通过三角函数展开得到
x′=rcosθcosϕ−rsinθsinϕ
y′=rsinθcosϕ+rcosθsinϕ
带入x和y表达式得到
x′=xcosθ−ysinθ
y′=xsinθ+ycosθ
写成矩阵的形式是:
尽管图示中仅仅表示的是旋转一个锐角 θ 的情形,但是我们推导中使用的是三角函数的基本定义来计算坐标的,因此当旋转的角度是任意角度(例如大于180度,导致v’点进入到第四象限)结论仍然是成立的。
3. 绕任意点的二维旋转
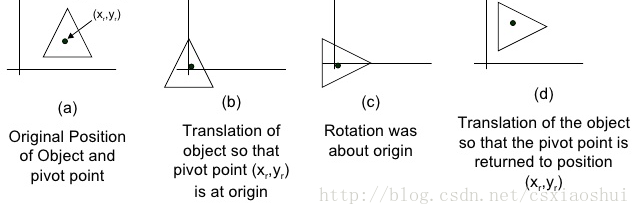
绕原点的旋转是二维旋转最基本的情况,当我们需要进行绕任意点旋转时,我们可以把这种情况转换到绕原点的旋转,思路如下:
1. 首先将旋转点移动到原点处
2. 执行如2所描述的绕原点的旋转
3. 再将旋转点移回到原来的位置
也就是说在处理绕任意点旋转的情况下需要执行两次平移的操作。假设平移的矩阵是T(x,y),也就是说我们需要得到的坐标 v’=T(x,y)*R*T(-x,-y)(我们使用的是列坐标描述点的坐标,因此是左乘,首先执行T(-x,-y))
在计算机图形学中,为了统一将平移、旋转、缩放等用矩阵表示,需要引入齐次坐标。(假设使用2x2的矩阵,是没有办法描述平移操作的,只有引入3x3矩阵形式,才能统一描述二维中的平移、旋转、缩放操作。同理必须使用4x4的矩阵才能统一描述三维的变换)。
对于二维平移,如下图所示,P点经过x和y方向的平移到P’点,可以得到:
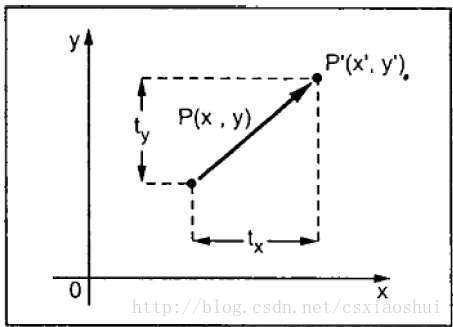
x′=x+txy′=y+ty
由于引入了齐次坐标,在描述二维坐标的时候,使用(x,y,w)的方式(一般w=1),于是可以写成下面矩阵的形式
按矩阵乘法展开,正好得到上面的表达式。也就是说平移矩阵是
如果平移值是(-tx,-ty)那么很明显平移矩阵式
我们可以把2中描述的旋转矩阵也扩展到3x3的方式,变为:
从平移和旋转的矩阵可以看出,3x3矩阵的前2x2部分是和旋转相关的,第三列与平移相关。有了上面的基础之后,我们很容易得出二维中绕任意点旋转的旋转矩阵了,只需要把三个矩阵乘起来即可:
4. 三维基本旋转
我们可以把一个旋转转换为绕基本坐标轴的旋转,因此有必要讨论一下绕三个坐标值x、y、z的旋转。
本文在讨论过程中使用的是类似于OpenGL中定义的右手坐标系,同时旋转角度的正负也遵循右手坐标系的约定。如下图所示

4.1 绕X轴的旋转
在三维场景中,当一个点P(x,y,z)绕x轴旋转 θ 角得到点P’(x’,y’,z’)。由于是绕x轴进行的旋转,因此x坐标保持不变,y和z组成的yoz(o是坐标原点)平面上进行的是一个二维的旋转,可以参考上图(y轴类似于二维旋转中的x轴,z轴类似于二维旋转中的y轴),于是有:
x′=x
y′=ycosθ−zsinθ
z′=ysinθ+zcosθ
写成(4x4)矩阵的形式
4.2 绕Y轴旋转
绕Y轴的旋转和绕X轴的旋转类似,Y坐标保持不变,除Y轴之外,ZOX组成的平面进行一次二维的旋转(Z轴类似于二维旋转的X轴,X轴类似于二维旋转中的Y轴,注意这里是ZOX,而不是XOZ,观察上图中右手系的图片可以很容易了解到这一点),同样有:
x′=zsinθ+xcosθ
y′=y
z′=zcosθ−xsinθ
写成(4x4)矩阵的形式
4.3 绕Z轴旋转
与上面类似,绕Z轴旋转,Z坐标保持不变,xoy组成的平面内正好进行一次二维旋转(和上面讨论二维旋转的情况完全一样)
4.4 小结
上面描述了三维变换中绕单一轴旋转的矩阵表达形式,绕三个轴旋转的矩阵很类似,其中绕y轴旋转的矩阵与绕x和z轴旋转的矩阵略有点不同(主要是三个轴向顺序和书写矩阵的方式不一致导致的,绕三个不同坐标旋转轴以及其他二个坐标轴组成平面的顺序是: XYZ(绕x轴) YZX(绕y轴) ZXY(绕z轴),其中绕y轴旋转,其他两个轴是ZX,这和我们书写矩阵按
的方式不一致,而导致看起来绕Y轴旋转的矩阵似乎是和其他两个矩阵不一致。如果我们颠倒写法,将公式写成
的方式,那么这三个旋转矩阵看起来在形式上就统一了,都是
这种表现形式了(左上角都是 −sinθ )
5. 绕任意轴的三维旋转
绕任意轴的三维旋转可以使用类似于绕任意点的二维旋转一样,将旋转分解为一些列基本的旋转。绕任意轴旋转如下图所示:
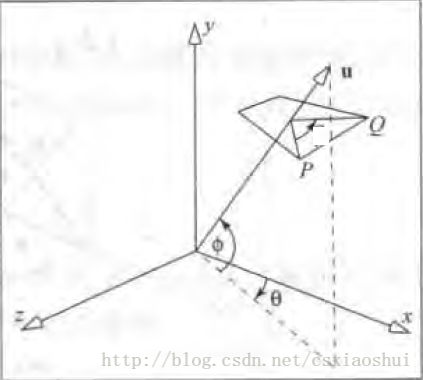
P点绕向量u旋转 θ 角,得到点Q,已知P点的坐标和向量u,如何求Q点的坐标。
我们可以把向量u进行一些旋转,让它与z轴重合,之后旋转P到Q就作了一次绕Z轴的三维基本旋转,之后我们再执行反向的旋转,将向量u变回到它原来的方向,也就是说需要进行的操作如下:
1. 将旋转轴u绕x轴旋转至xoz平面
2. 将旋转轴u绕y轴旋转至于z轴重合
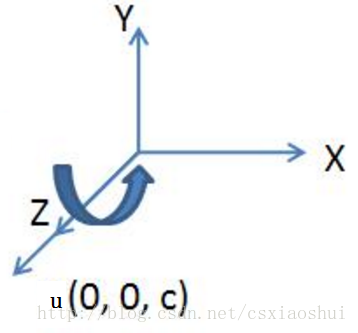
3. 绕z轴旋转 θ 角
4. 执行步骤2的逆过程
5. 执行步骤1的逆过程
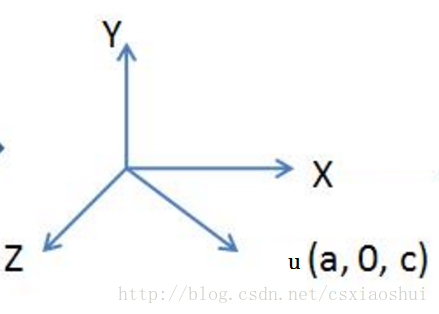
原始的旋转轴u如下图所示:

第1、2、3步骤如下图所示:
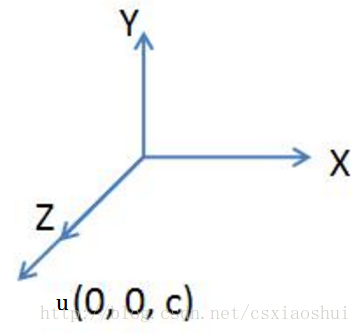
步骤1将向量u旋转至xoz平面的操作是一个绕x轴的旋转操作,步骤2将向量u旋转到与z轴重合,第1、2步骤的示意图如下:
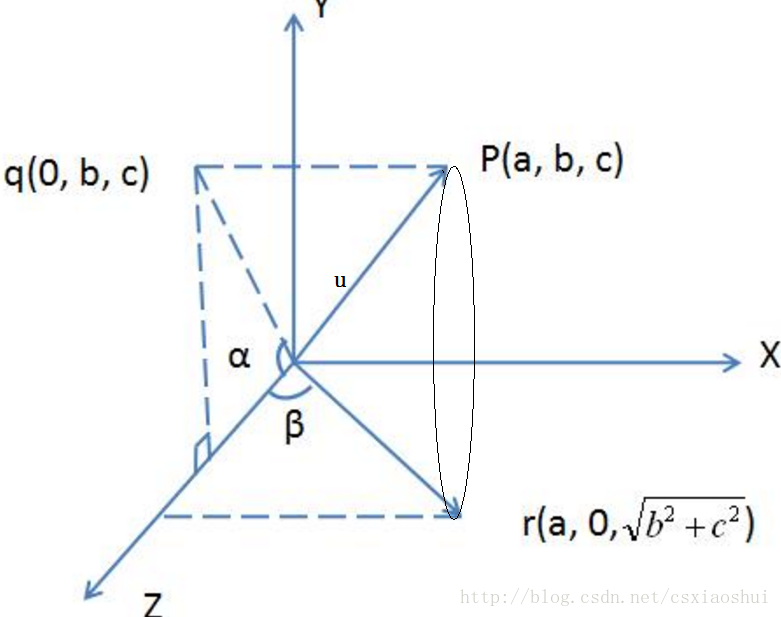
作点P在yoz平面的投影点q,q的坐标是(0, b, c),原点o与q点的连线oq和z轴的夹角就是u绕x轴旋转的角度。通过这次旋转使得u向量旋转到xoz平面(图中的or向量)【步骤1】
过r点作z轴的垂线,or与z轴的夹角为 β , 这个角度就是绕Y轴旋转的角度,通过这次旋转使得u向量旋转到与z轴重合【步骤2】
步骤1中绕x轴旋转的是一次基本的绕x轴的三维旋转,按照之前的讨论,旋转矩阵是:
这里的 θ 就是图中所示的 α 角 (注意 α 角度是绕x旋转的正的角度)
从图中我们还可以得到:
于是旋转矩阵(记作 Rx(α) )为:
在完成步骤1之后,向量u被变换到了r的位置,我们继续步骤2的操作,绕y轴旋转 负的 β 角(注意:这里的 β 是负的),经过这次变换之后向量u与z轴完全重合,由于这一步也是执行的一次绕Y轴的基本旋转,旋转矩阵(记作 Ry(−β) )为:
使用 −β 替换表达式中的 θ ,此外根据图中描述,我们可以计算得到:
带入上面的表达式,于是旋转矩阵(记作 Ry(−β) )为:
在完成前面两个步骤之后,u方向和z轴完全重合,因此执行旋转 θ 角,执行的是一次绕z轴的基本三维旋转(记作 R(θ) ,根据之前的讨论,我们可以得到:
最后两步骤是前面1和2的逆操作,也就是绕Y轴旋转 β 和绕X轴旋转 −α ,这两个矩阵分别记作 Ry(β) 和 Rx(−α) ,得到它们的方式很简单,只需要将上面步骤1和步骤2中的角度修改成相反数即可,也就是:
最终得到 绕任意轴u旋转的旋转矩阵是【因为使用的列向量,因此执行的是左乘(从右往左)】:
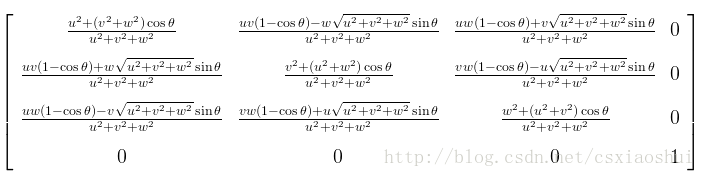
(注:式中的(u,v,w)对应上文中向量(a,b,c),公式我自己笔算过,为了减少编辑公式的时间(使用LaTex编辑太繁琐,因此找了一张公式的图片贴在此处)
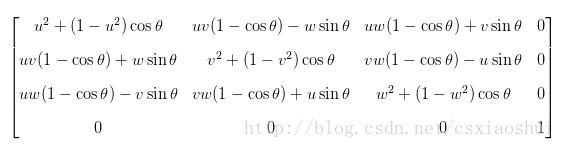
如果向量是经过单位化的(单位向量),那么有 a2+b2+c2=1 ,可以简化上述的公式,得到:
参考文献:
智能推荐
从零开始搭建Hadoop_创建一个hadoop项目-程序员宅基地
文章浏览阅读331次。第一部分:准备工作1 安装虚拟机2 安装centos73 安装JDK以上三步是准备工作,至此已经完成一台已安装JDK的主机第二部分:准备3台虚拟机以下所有工作最好都在root权限下操作1 克隆上面已经有一台虚拟机了,现在对master进行克隆,克隆出另外2台子机;1.1 进行克隆21.2 下一步1.3 下一步1.4 下一步1.5 根据子机需要,命名和安装路径1.6 ..._创建一个hadoop项目
心脏滴血漏洞HeartBleed CVE-2014-0160深入代码层面的分析_heartbleed代码分析-程序员宅基地
文章浏览阅读1.7k次。心脏滴血漏洞HeartBleed CVE-2014-0160 是由heartbeat功能引入的,本文从深入码层面的分析该漏洞产生的原因_heartbleed代码分析
java读取ofd文档内容_ofd电子文档内容分析工具(分析文档、签章和证书)-程序员宅基地
文章浏览阅读1.4k次。前言ofd是国家文档标准,其对标的文档格式是pdf。ofd文档是容器格式文件,ofd其实就是压缩包。将ofd文件后缀改为.zip,解压后可看到文件包含的内容。ofd文件分析工具下载:点我下载。ofd文件解压后,可以看到如下内容: 对于xml文件,可以用文本工具查看。但是对于印章文件(Seal.esl)、签名文件(SignedValue.dat)就无法查看其内容了。本人开发一款ofd内容查看器,..._signedvalue.dat
基于FPGA的数据采集系统(一)_基于fpga的信息采集-程序员宅基地
文章浏览阅读1.8w次,点赞29次,收藏313次。整体系统设计本设计主要是对ADC和DAC的使用,主要实现功能流程为:首先通过串口向FPGA发送控制信号,控制DAC芯片tlv5618进行DA装换,转换的数据存在ROM中,转换开始时读取ROM中数据进行读取转换。其次用按键控制adc128s052进行模数转换100次,模数转换数据存储到FIFO中,再从FIFO中读取数据通过串口输出显示在pc上。其整体系统框图如下:图1:FPGA数据采集系统框图从图中可以看出,该系统主要包括9个模块:串口接收模块、按键消抖模块、按键控制模块、ROM模块、D.._基于fpga的信息采集
微服务 spring cloud zuul com.netflix.zuul.exception.ZuulException GENERAL-程序员宅基地
文章浏览阅读2.5w次。1.背景错误信息:-- [http-nio-9904-exec-5] o.s.c.n.z.filters.post.SendErrorFilter : Error during filteringcom.netflix.zuul.exception.ZuulException: Forwarding error at org.springframework.cloud..._com.netflix.zuul.exception.zuulexception
邻接矩阵-建立图-程序员宅基地
文章浏览阅读358次。1.介绍图的相关概念 图是由顶点的有穷非空集和一个描述顶点之间关系-边(或者弧)的集合组成。通常,图中的数据元素被称为顶点,顶点间的关系用边表示,图通常用字母G表示,图的顶点通常用字母V表示,所以图可以定义为: G=(V,E)其中,V(G)是图中顶点的有穷非空集合,E(G)是V(G)中顶点的边的有穷集合1.1 无向图:图中任意两个顶点构成的边是没有方向的1.2 有向图:图中..._给定一个邻接矩阵未必能够造出一个图
随便推点
MDT2012部署系列之11 WDS安装与配置-程序员宅基地
文章浏览阅读321次。(十二)、WDS服务器安装通过前面的测试我们会发现,每次安装的时候需要加域光盘映像,这是一个比较麻烦的事情,试想一个上万个的公司,你天天带着一个光盘与光驱去给别人装系统,这将是一个多么痛苦的事情啊,有什么方法可以解决这个问题了?答案是肯定的,下面我们就来简单说一下。WDS服务器,它是Windows自带的一个免费的基于系统本身角色的一个功能,它主要提供一种简单、安全的通过网络快速、远程将Window..._doc server2012上通过wds+mdt无人值守部署win11系统.doc
python--xlrd/xlwt/xlutils_xlutils模块可以读xlsx吗-程序员宅基地
文章浏览阅读219次。python–xlrd/xlwt/xlutilsxlrd只能读取,不能改,支持 xlsx和xls 格式xlwt只能改,不能读xlwt只能保存为.xls格式xlutils能将xlrd.Book转为xlwt.Workbook,从而得以在现有xls的基础上修改数据,并创建一个新的xls,实现修改xlrd打开文件import xlrdexcel=xlrd.open_workbook('E:/test.xlsx') 返回值为xlrd.book.Book对象,不能修改获取sheett_xlutils模块可以读xlsx吗
关于新版本selenium定位元素报错:‘WebDriver‘ object has no attribute ‘find_element_by_id‘等问题_unresolved attribute reference 'find_element_by_id-程序员宅基地
文章浏览阅读8.2w次,点赞267次,收藏656次。运行Selenium出现'WebDriver' object has no attribute 'find_element_by_id'或AttributeError: 'WebDriver' object has no attribute 'find_element_by_xpath'等定位元素代码错误,是因为selenium更新到了新的版本,以前的一些语法经过改动。..............._unresolved attribute reference 'find_element_by_id' for class 'webdriver
DOM对象转换成jQuery对象转换与子页面获取父页面DOM对象-程序员宅基地
文章浏览阅读198次。一:模态窗口//父页面JSwindow.showModalDialog(ifrmehref, window, 'dialogWidth:550px;dialogHeight:150px;help:no;resizable:no;status:no');//子页面获取父页面DOM对象//window.showModalDialog的DOM对象var v=parentWin..._jquery获取父window下的dom对象
什么是算法?-程序员宅基地
文章浏览阅读1.7w次,点赞15次,收藏129次。算法(algorithm)是解决一系列问题的清晰指令,也就是,能对一定规范的输入,在有限的时间内获得所要求的输出。 简单来说,算法就是解决一个问题的具体方法和步骤。算法是程序的灵 魂。二、算法的特征1.可行性 算法中执行的任何计算步骤都可以分解为基本可执行的操作步,即每个计算步都可以在有限时间里完成(也称之为有效性) 算法的每一步都要有确切的意义,不能有二义性。例如“增加x的值”,并没有说增加多少,计算机就无法执行明确的运算。 _算法
【网络安全】网络安全的标准和规范_网络安全标准规范-程序员宅基地
文章浏览阅读1.5k次,点赞18次,收藏26次。网络安全的标准和规范是网络安全领域的重要组成部分。它们为网络安全提供了技术依据,规定了网络安全的技术要求和操作方式,帮助我们构建安全的网络环境。下面,我们将详细介绍一些主要的网络安全标准和规范,以及它们在实际操作中的应用。_网络安全标准规范