深入理解SLAM技术概述-程序员宅基地
技术标签: 自动驾驶 人工智能 # 射影几何和slam基础
一、说明
SLAM(同步定位和地图绘制)是一种用于自动驾驶车辆的方法,可让您构建地图并同时在该地图中定位您的车辆。SLAM 算法允许车辆绘制未知环境的地图。工程师利用地图信息来执行路径规划和避障等任务。
二、为什么 SLAM 很重要
SLAM多年来一直是技术研究的课题。但随着计算机处理速度的大幅提高以及相机和激光测距仪等低成本传感器的出现,SLAM 现在已在越来越多的领域得到实际应用。为了理解 SLAM 的重要性,让我们看一下它的一些优点和应用示例。
2.1 SLAM 示例
考虑家用机器人真空吸尘器。如果没有 SLAM,它只会在房间内随机移动,可能无法清洁整个地板表面。此外,这种方法使用过多的电量,因此电池会更快耗尽。另一方面,具有 SLAM 的机器人可以使用车轮转数等信息以及来自摄像机和其他图像传感器的数据来确定所需的移动量。这称为本地化。机器人还可以同时使用摄像头和其他传感器来创建周围障碍物的地图,避免对同一区域进行两次清洁。这称为映射。
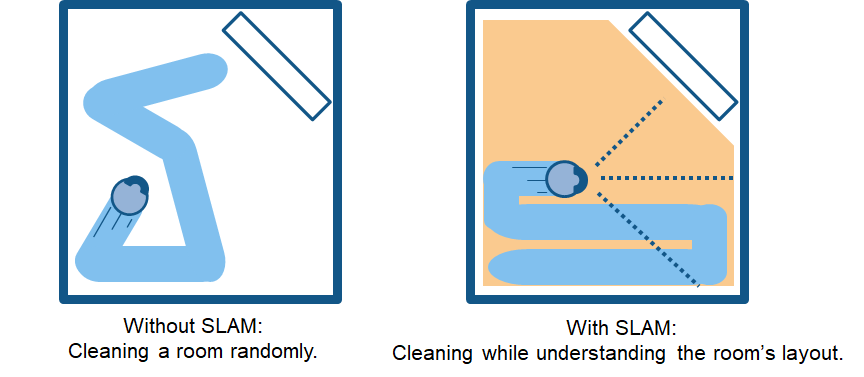
SLAM 对清洁机器人的好处
SLAM 在许多其他应用中也很有用,例如导航移动机器人车队在仓库中安排货架、将自动驾驶汽车停放在空位上,或者通过在未知环境中导航无人机来递送包裹。MATLAB 和 Simulink 提供SLAM 算法、函数和分析工具来开发各种应用程序。您可以实现同步定位和建图以及其他任务,例如传感器融合、对象跟踪、路径规划和路径跟踪。
三、SLAM 的工作原理
从广义上讲,有两种类型的技术组件用于实现 SLAM。第一类是传感器信号处理,包括前端处理,这很大程度上取决于所使用的传感器。第二种类型是位姿图优化,包括与传感器无关的后端处理。

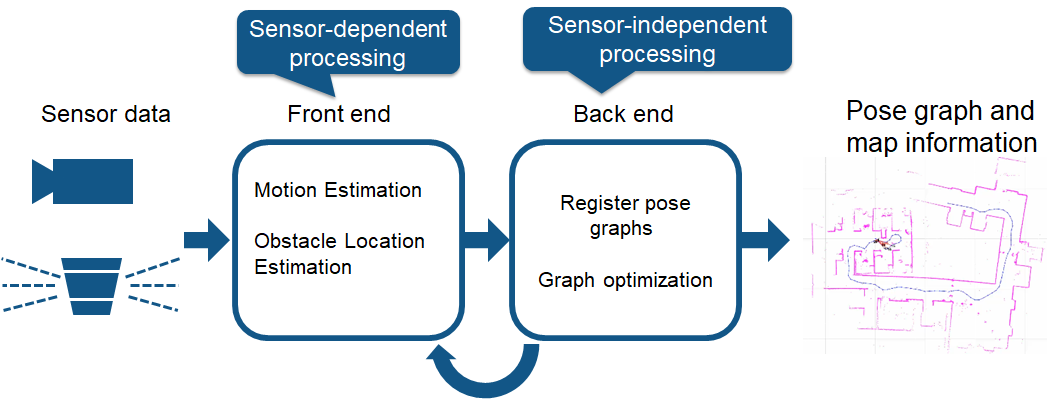
SLAM处理流程
要了解有关前端处理组件的更多信息,让我们看一下视觉 SLAM 和激光雷达 SLAM——两种不同的 SLAM 方法。
3.1 视觉SLAM
顾名思义,视觉 SLAM(或 vSLAM)使用从摄像机和其他图像传感器获取的图像。视觉SLAM可以使用简单相机(广角、鱼眼和球面相机)、复眼相机(立体和多相机)和RGB-D相机(深度和ToF相机)。
视觉 SLAM 可以通过相对便宜的相机以低成本实现。此外,由于相机提供大量信息,因此它们可用于检测地标(先前测量的位置)。地标检测还可以与基于图的优化相结合,实现 SLAM 实施的灵活性。
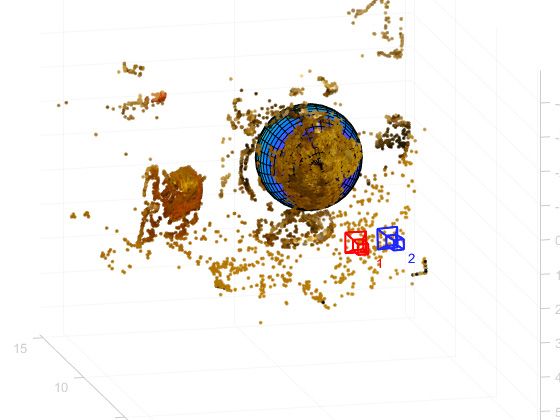
单目 SLAM 是指 vSLAM 使用单个摄像头作为唯一传感器,这使得定义深度变得具有挑战性。这可以通过检测 AR 标记、棋盘或图像中的其他已知物体进行定位来解决,或者将摄像头信息与惯性测量单元 (IMU) 等其他传感器融合,后者可以测量速度和方向等物理量。与vSLAM相关的技术包括运动结构(SfM)、视觉里程计和束调整。
视觉SLAM算法 大致可以分为两类。稀疏方法匹配图像的特征点,使用PTAM、ORB-SLAM等算法。密集方法利用图像的整体亮度,并使用 DTAM、LSD-SLAM、DSO 和 SVO 等算法。
结构源于运动。
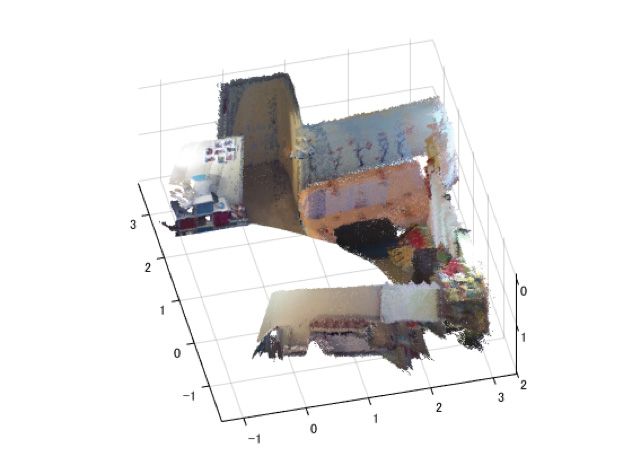
RGB-D SLAM 的点云配准
3.2 激光雷达SLAM
光探测和测距(激光雷达)是一种主要使用激光传感器(或距离传感器)的方法。
与摄像头、ToF 和其他传感器相比,激光的精确度明显更高,适用于自动驾驶汽车和无人机等高速移动车辆的应用。激光传感器的输出值通常是 2D (x, y) 或 3D (x, y, z) 点云数据。激光传感器点云提供高精度距离测量,对于 SLAM 地图构建非常有效。通常,通过匹配点云来顺序估计运动。计算出的移动(行驶距离)用于定位车辆。对于激光雷达点云匹配,使用迭代最近点(ICP)和正态分布变换(NDT)算法等配准算法。2D 或 3D 点云图可以表示为网格图或体素图。
另一方面,点云在密度方面不如图像详细,并且并不总是提供足够的特征用于匹配。例如,在障碍物很少的地方,很难对齐点云,这可能会导致丢失车辆位置。此外,点云匹配通常需要较高的处理能力,因此需要优化流程以提高速度。由于这些挑战,自动驾驶车辆的定位可能需要融合其他测量结果,例如车轮里程计、全球导航卫星系统 (GNSS) 和 IMU 数据。对于仓库机器人等应用, 通常使用 2D 激光雷达 SLAM ,而使用 3D 激光雷达点云的 SLAM 可用于无人机和自动驾驶。
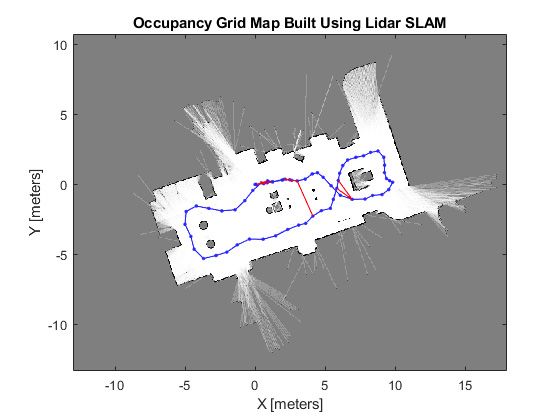
SLAM 与 2D LiDAR
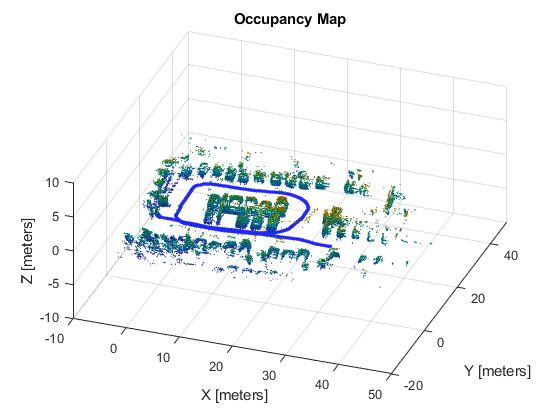
SLAM 与 3D LiDAR
四、SLAM 的常见挑战
尽管 SLAM 用于一些实际应用,但一些技术挑战阻碍了更通用的采用。每个人都有一个可以帮助克服障碍的对策。
4.1. 定位误差累积,导致与实际值存在较大偏差
SLAM 估计顺序运动,其中包含一定的误差幅度。误差随着时间的推移而累积,导致与实际值的显着偏差。它还可能导致地图数据崩溃或扭曲,使后续搜索变得困难。我们以绕方形通道行驶为例。随着误差的累积,机器人的起点和终点不再匹配。这称为循环闭合问题。像这样的姿势估计错误是不可避免的。检测闭环并确定如何纠正或消除累积的错误非常重要。
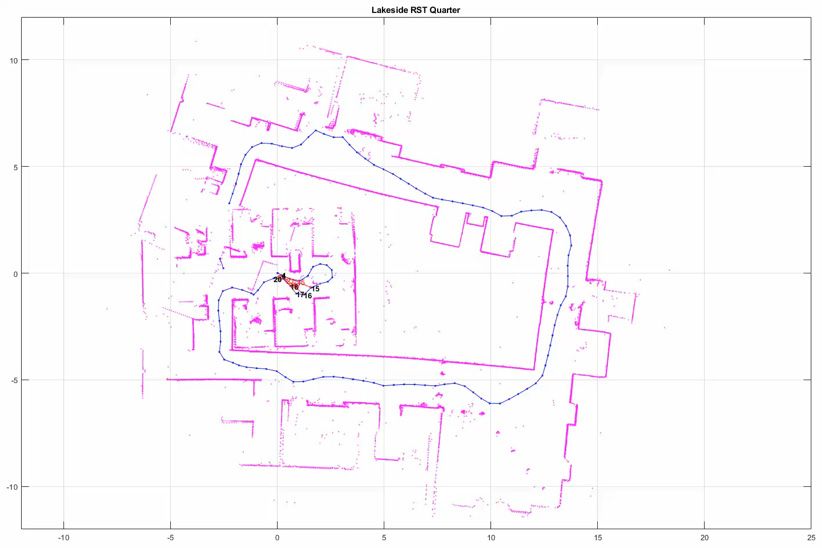
构建位姿图并最小化错误的示例。
一种对策是记住以前访问过的地方的一些特征作为地标,并最大限度地减少定位误差。构建姿势图是为了帮助纠正错误。通过将误差最小化作为优化问题来解决,可以生成更准确的地图数据。这种优化在视觉SLAM中称为捆绑调整。
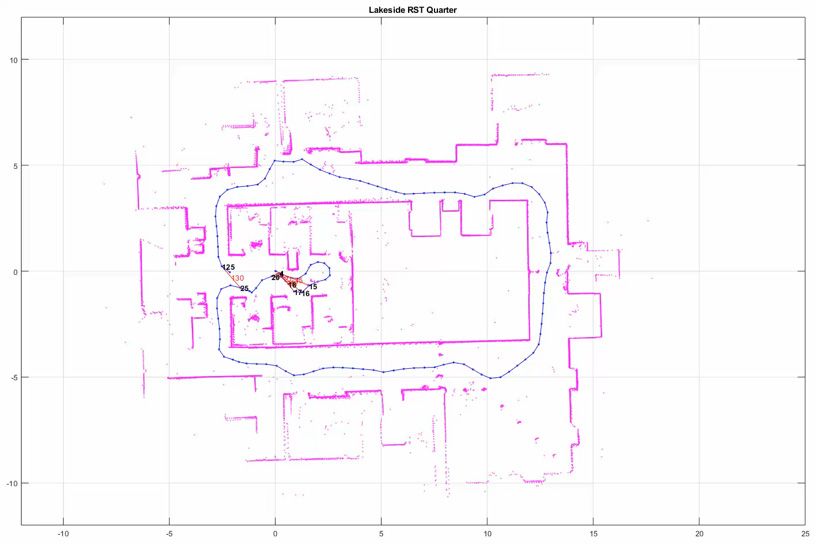
构建位姿图并最小化错误的示例
4.2. 定位失败,地图位置丢失
图像和点云映射没有考虑机器人运动的特征。在某些情况下,这种方法可能会生成不连续的位置估计。例如,计算结果显示,以 1 m/s 速度移动的机器人突然向前跳跃了 10 米。可以通过使用恢复算法或将运动模型与多个传感器融合以根据传感器数据进行计算来防止这种定位失败。
使用具有传感器融合的运动模型的方法有多种。一种常见的方法是使用卡尔曼滤波进行定位。由于大多数差动驱动机器人和四轮车辆通常使用非线性运动模型,因此经常使用扩展卡尔曼滤波器和粒子滤波器(蒙特卡罗定位)。在某些情况下,还可以使用更灵活的贝叶斯滤波器,例如无迹卡尔曼滤波器。一些常用的传感器是惯性测量设备,例如 IMU、姿态和航向参考系统或AHRS、惯性导航系统或 INS、加速度计传感器、陀螺仪传感器和磁传感器。安装在车辆上的车轮编码器通常用于里程计。
当定位失败时,恢复的对策是记住以前访问过的地方的地标作为关键帧。在搜索地标时,会以高速扫描的方式应用特征提取过程。一些基于图像特征的方法包括特征袋(BoF)和视觉词袋(BoVW)。最近,深度学习被用于比较特征的距离。
4.3.图像处理、点云处理和优化的计算成本较高
在车辆硬件上实施 SLAM 时,计算成本是一个问题。计算通常在处理能力有限的紧凑且低能耗的嵌入式微处理器上执行。为了实现精确定位,必须高频度地执行图像处理和点云匹配。另外,闭环等优化计算属于高计算过程。挑战在于如何在嵌入式微型计算机上执行这种计算成本高昂的处理。
一种对策是并行运行不同的进程。特征提取等过程是匹配过程的预处理,比较适合并行化。使用多核 CPU 进行处理、单指令多数据 (SIMD) 计算和嵌入式 GPU 在某些情况下可以进一步提高速度。此外,由于位姿图优化可以在相对较长的周期内执行,因此降低其优先级并定期执行此过程也可以提高性能。
五、SLAM的理论基础
SLAM技术是需要一些抽象的数学,虽有一些难度,但还没到了“坚不可摧”的地步。这一章我们专门梳理一下,到底需要哪些数学知识和数学概念,这些知识用到哪些恰当的地方,也就是这些数学概念的物理环境是啥。有了整体概念,我们将一个一个地将它们向钉子一样拔除。
上过大学的同学,总以为你的高等教育把数学囊括了,高数、概率、线代学一下,就可以包打天下,这种想法是不对的,也是大多数人的误区。本人在收集数学书籍至少两千五百本,每一本都比高数难,比高数抽象。然而这些书如何读懂?基础是《泛函分析》,当然就我本身的知识结构,我认为《数理方程》也是一门决定思维框架课程,其次还有《矢量场论》也构成一个基本概念。读者可能没有我这样好的数学功底,但不要泄气,我要用最简单的逻辑去解释深奥抽象的数学,让你完全明白其中的道理,并与生活常识对应起来。
以下列出,我们将从哪些知识说起,我所列的书籍自己已经涉略,但来不及写成文字,未来将逐步专题讨论,但是时间可能漫长。有兴趣的朋友也可以向我推荐相关题目,让我们群体讨论,将知识学扎实。
1 《高等几何》
这本书里讲的是,射影几何,仿射几何,齐次坐标等等;有志的同学,不妨啃啃这本书。其实,你只要学习一半,也就够你开发SLAM了。
2 《刚体运动》
这是一篇我写的讲义,其目的是将物体运动中,从三角函数的思维,切换到群论的思维。
3 《群论》或《伽罗华群》
解决问题不仅仅是个计算,群结构将大量的运算处理的简捷、明快、干净,真是一门上好的理论。
4 《李群和李代数》
将连续流形当作一个变换群,进而解决刚体在三维空间连续运动的轨迹,和抽样。
5 《卡尔曼滤波》
SLAM机器人的轨迹,计算的预测轨迹存在区别,用卡尔曼滤波去优化是合理选择。
6 《数字图像处理--特征点提取匹配》
双目镜头需要通过特征点匹配,以及三角测量法完成定位。
好了,暂时列出提纲,日后一步一步补全这些知识。
智能推荐
分布式光纤传感器的全球与中国市场2022-2028年:技术、参与者、趋势、市场规模及占有率研究报告_预计2026年中国分布式传感器市场规模有多大-程序员宅基地
文章浏览阅读3.2k次。本文研究全球与中国市场分布式光纤传感器的发展现状及未来发展趋势,分别从生产和消费的角度分析分布式光纤传感器的主要生产地区、主要消费地区以及主要的生产商。重点分析全球与中国市场的主要厂商产品特点、产品规格、不同规格产品的价格、产量、产值及全球和中国市场主要生产商的市场份额。主要生产商包括:FISO TechnologiesBrugg KabelSensor HighwayOmnisensAFL GlobalQinetiQ GroupLockheed MartinOSENSA Innovati_预计2026年中国分布式传感器市场规模有多大
07_08 常用组合逻辑电路结构——为IC设计的延时估计铺垫_基4布斯算法代码-程序员宅基地
文章浏览阅读1.1k次,点赞2次,收藏12次。常用组合逻辑电路结构——为IC设计的延时估计铺垫学习目的:估计模块间的delay,确保写的代码的timing 综合能给到多少HZ,以满足需求!_基4布斯算法代码
OpenAI Manager助手(基于SpringBoot和Vue)_chatgpt网页版-程序员宅基地
文章浏览阅读3.3k次,点赞3次,收藏5次。OpenAI Manager助手(基于SpringBoot和Vue)_chatgpt网页版
关于美国计算机奥赛USACO,你想知道的都在这_usaco可以多次提交吗-程序员宅基地
文章浏览阅读2.2k次。USACO自1992年举办,到目前为止已经举办了27届,目的是为了帮助美国信息学国家队选拔IOI的队员,目前逐渐发展为全球热门的线上赛事,成为美国大学申请条件下,含金量相当高的官方竞赛。USACO的比赛成绩可以助力计算机专业留学,越来越多的学生进入了康奈尔,麻省理工,普林斯顿,哈佛和耶鲁等大学,这些同学的共同点是他们都参加了美国计算机科学竞赛(USACO),并且取得过非常好的成绩。适合参赛人群USACO适合国内在读学生有意向申请美国大学的或者想锻炼自己编程能力的同学,高三学生也可以参加12月的第_usaco可以多次提交吗
MySQL存储过程和自定义函数_mysql自定义函数和存储过程-程序员宅基地
文章浏览阅读394次。1.1 存储程序1.2 创建存储过程1.3 创建自定义函数1.3.1 示例1.4 自定义函数和存储过程的区别1.5 变量的使用1.6 定义条件和处理程序1.6.1 定义条件1.6.1.1 示例1.6.2 定义处理程序1.6.2.1 示例1.7 光标的使用1.7.1 声明光标1.7.2 打开光标1.7.3 使用光标1.7.4 关闭光标1.8 流程控制的使用1.8.1 IF语句1.8.2 CASE语句1.8.3 LOOP语句1.8.4 LEAVE语句1.8.5 ITERATE语句1.8.6 REPEAT语句。_mysql自定义函数和存储过程
半导体基础知识与PN结_本征半导体电流为0-程序员宅基地
文章浏览阅读188次。半导体二极管——集成电路最小组成单元。_本征半导体电流为0
随便推点
【Unity3d Shader】水面和岩浆效果_unity 岩浆shader-程序员宅基地
文章浏览阅读2.8k次,点赞3次,收藏18次。游戏水面特效实现方式太多。咱们这边介绍的是一最简单的UV动画(无顶点位移),整个mesh由4个顶点构成。实现了水面效果(左图),不动代码稍微修改下参数和贴图可以实现岩浆效果(右图)。有要思路是1,uv按时间去做正弦波移动2,在1的基础上加个凹凸图混合uv3,在1、2的基础上加个水流方向4,加上对雾效的支持,如没必要请自行删除雾效代码(把包含fog的几行代码删除)S..._unity 岩浆shader
广义线性模型——Logistic回归模型(1)_广义线性回归模型-程序员宅基地
文章浏览阅读5k次。广义线性模型是线性模型的扩展,它通过连接函数建立响应变量的数学期望值与线性组合的预测变量之间的关系。广义线性模型拟合的形式为:其中g(μY)是条件均值的函数(称为连接函数)。另外,你可放松Y为正态分布的假设,改为Y 服从指数分布族中的一种分布即可。设定好连接函数和概率分布后,便可以通过最大似然估计的多次迭代推导出各参数值。在大部分情况下,线性模型就可以通过一系列连续型或类别型预测变量来预测正态分布的响应变量的工作。但是,有时候我们要进行非正态因变量的分析,例如:(1)类别型.._广义线性回归模型
HTML+CSS大作业 环境网页设计与实现(垃圾分类) web前端开发技术 web课程设计 网页规划与设计_垃圾分类网页设计目标怎么写-程序员宅基地
文章浏览阅读69次。环境保护、 保护地球、 校园环保、垃圾分类、绿色家园、等网站的设计与制作。 总结了一些学生网页制作的经验:一般的网页需要融入以下知识点:div+css布局、浮动、定位、高级css、表格、表单及验证、js轮播图、音频 视频 Flash的应用、ul li、下拉导航栏、鼠标划过效果等知识点,网页的风格主题也很全面:如爱好、风景、校园、美食、动漫、游戏、咖啡、音乐、家乡、电影、名人、商城以及个人主页等主题,学生、新手可参考下方页面的布局和设计和HTML源码(有用点赞△) 一套A+的网_垃圾分类网页设计目标怎么写
C# .Net 发布后,把dll全部放在一个文件夹中,让软件目录更整洁_.net dll 全局目录-程序员宅基地
文章浏览阅读614次,点赞7次,收藏11次。之前找到一个修改 exe 中 DLL地址 的方法, 不太好使,虽然能正确启动, 但无法改变 exe 的工作目录,这就影响了.Net 中很多获取 exe 执行目录来拼接的地址 ( 相对路径 ),比如 wwwroot 和 代码中相对目录还有一些复制到目录的普通文件 等等,它们的地址都会指向原来 exe 的目录, 而不是自定义的 “lib” 目录,根本原因就是没有修改 exe 的工作目录这次来搞一个启动程序,把 .net 的所有东西都放在一个文件夹,在文件夹同级的目录制作一个 exe._.net dll 全局目录
BRIEF特征点描述算法_breif description calculation 特征点-程序员宅基地
文章浏览阅读1.5k次。本文为转载,原博客地址:http://blog.csdn.net/hujingshuang/article/details/46910259简介 BRIEF是2010年的一篇名为《BRIEF:Binary Robust Independent Elementary Features》的文章中提出,BRIEF是对已检测到的特征点进行描述,它是一种二进制编码的描述子,摈弃了利用区域灰度..._breif description calculation 特征点
房屋租赁管理系统的设计和实现,SpringBoot计算机毕业设计论文_基于spring boot的房屋租赁系统论文-程序员宅基地
文章浏览阅读4.1k次,点赞21次,收藏79次。本文是《基于SpringBoot的房屋租赁管理系统》的配套原创说明文档,可以给应届毕业生提供格式撰写参考,也可以给开发类似系统的朋友们提供功能业务设计思路。_基于spring boot的房屋租赁系统论文