中正平和的机器人学笔记——2. 机械臂逆运动学(附MATAB代码)_平面三连杆机械臂逆运动学-程序员宅基地
0. 预备知识(别跳过呀)
上一篇我们讲了正运动学,也就是通过齐次变换矩阵,知晓关节角后求得机械臂末端的位姿,并表示在基座标系下。这一篇我们就来讲一讲逆运动学问题——已知工具坐标系{T}相对于固定坐标系{S}的期望位姿,如何计算一系列满足期望要求的关节角?
0.1 求解的难度
这是一个难度更大的问题,因为求解操作臂运动学方程是一个非线性问题。譬如六自由度的机械臂Puma560,回顾最后求得的运动学方程,
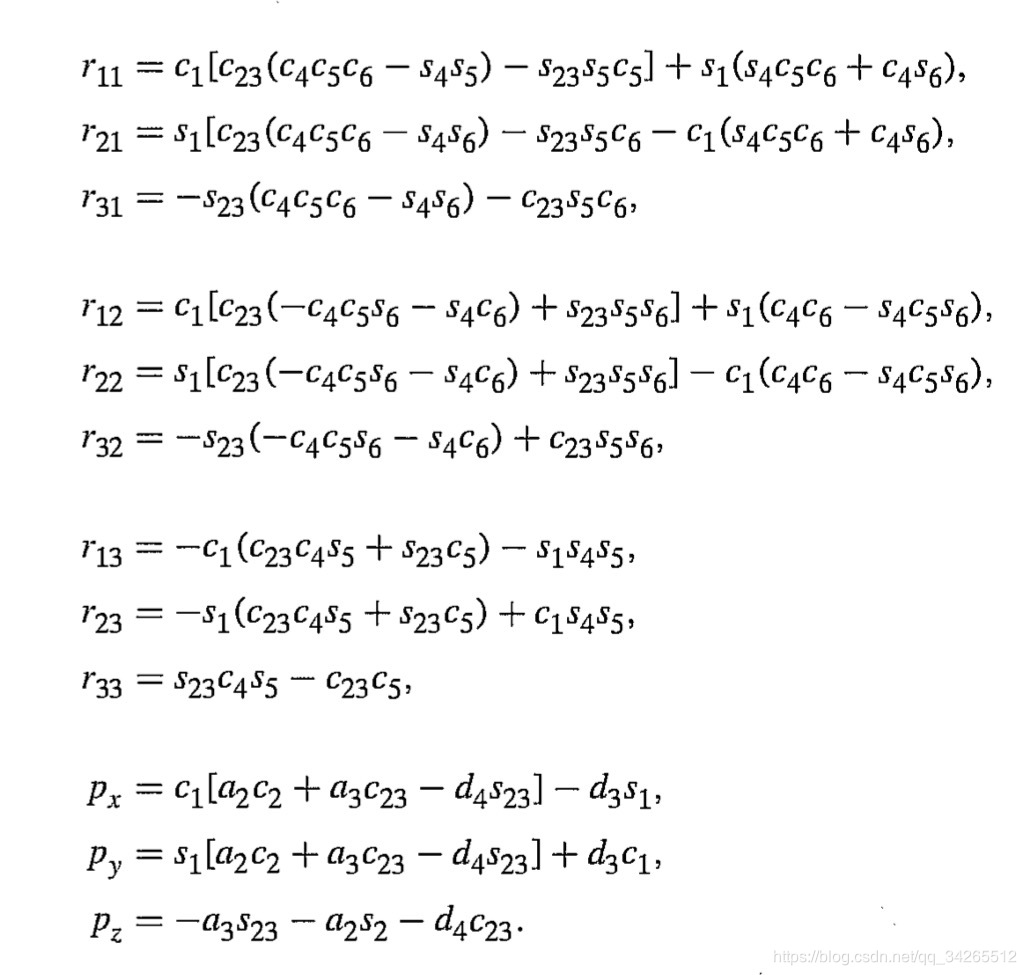
这里我们一共有12个方程,6个未知数。旋转部分3×3的矩阵由于每一列都是单位矢量,两两正交,因此这9个方程只有3个是独立的。再加上第四列前三行位置矢量的三个方程,6个方程对应6个未知数,应当是有解的。但是其中含有sin和cos,是非线性超越方程,求解难度很大,应到考虑到解是否存在,多解以及求解方法的问题。
0.2 解的存在性
这里引入三个概念,
工作空间(workspace):操作臂末端的执行器所能达到的范围。
灵巧工作空间(dexterous workspace):机器人末端执行器能从各个方向达到的空间。
可达工作空间(reachable workspace):机器人至少从一个方向上可以道德的空间。
从上述概念可以分析得到,如果要求解存在,那么期望点一定在工作空间内才行。
我们以两连杆机械臂为例,如果l1 = l2 = r,且关节旋转角能达到360°,那么其可达工作空间为半径为2r的圆,灵巧工作空间为原点;如果l1 ≠ l2,那么可达工作空间为外径l1 + l2,内径为|l1 - l2|的圆环,不存在灵巧工作空间。
一般的,当机械臂自由度小于6时,其不能到达三维空间内一般的目标位姿。
0.3 多解问题
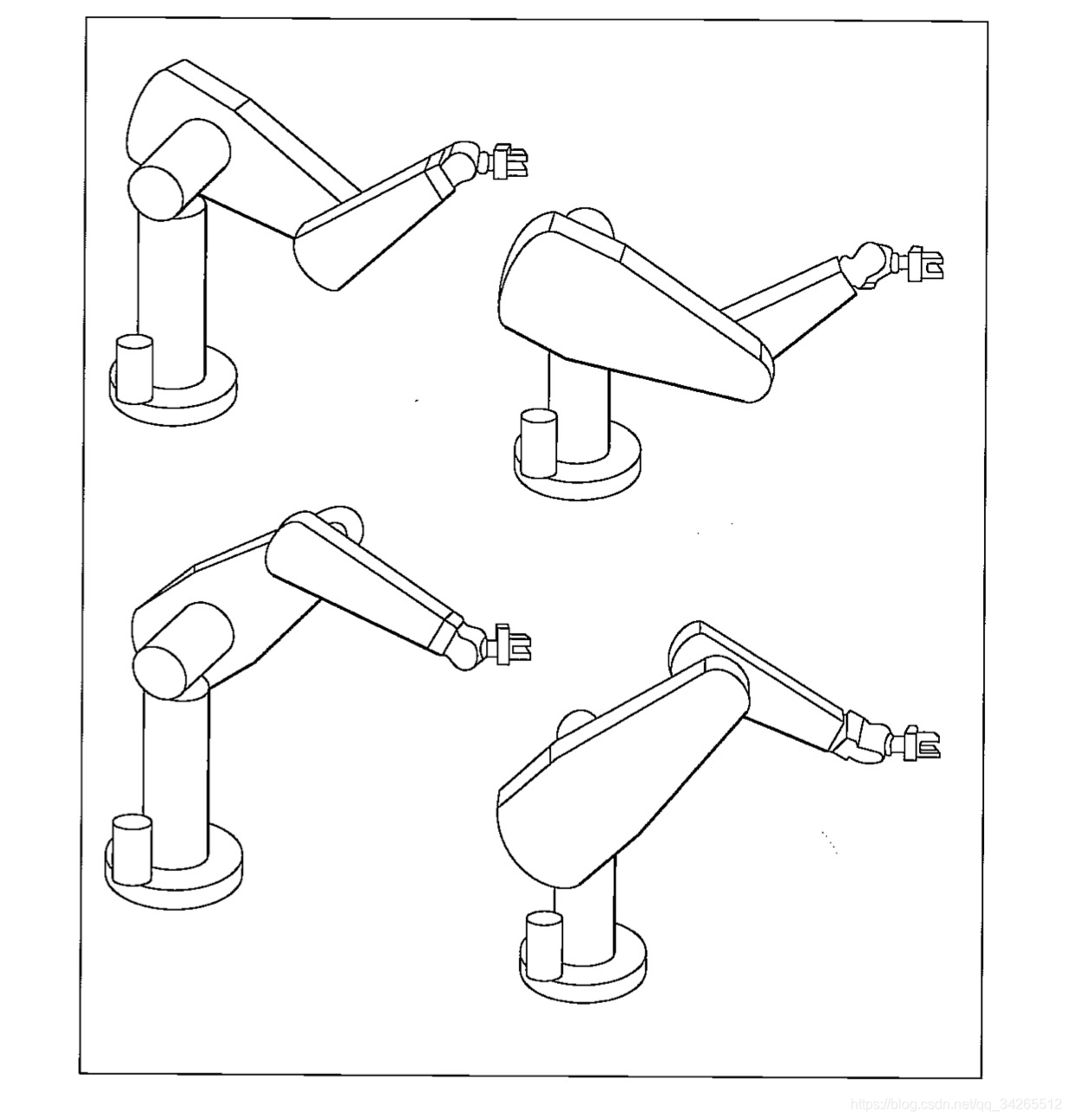
多解问题也很好理解,例如Puma560机械臂,对已确定目标可有8个不同解,但往往由于关节运动范围的限制,这8个解中的某些解不能实现。如下图所示:
0.4 解法
由于非线性方程组没有通用的求解算法&
智能推荐
Qt5通信 QByteArray中文字符 出现乱码 解决方法_qbytearray中文乱码-程序员宅基地
文章浏览阅读2.4k次,点赞3次,收藏9次。在写qt网口通信的过程中,遇到中文就乱码。解决方法如下:1.接收端处理中文乱码代码如下 QByteArray-> QString 中文乱码解决: #include <QTextCodec>QByteArray data= tcpSocket->readAll(); QTextCodec *tc = QTextCodec::codecForName("GBK"); QString str = tc->toUnicode(data);//str如果是中文则是中文字符_qbytearray中文乱码
JavaScript之DOM操作获取元素、事件、操作元素、节点操作_元素事件-程序员宅基地
文章浏览阅读2.5k次,点赞2次,收藏15次。什么是 DOM?文档对象模型(Document Object Model,简称 DOM),是 W3C 组织推荐的处理可扩展标记语言(HTML或者XML)的标准编程接口。W3C 已经定义了一系列的 DOM 接口,通过这些 DOM 接口可以改变网页的内容、结构和样式DOM 树文档:一个页面就是一个文档,DOM 中使用 document 表示元素:页面中的所有标签都是元素,DOM 中使用 element 表示节点:网页中的所有内容都是节点(标签、属性、文本、注释等),DOM 中使用 node._元素事件
安卓基础知识(一) 服务(Service)_安卓服务-程序员宅基地
文章浏览阅读1.4k次,点赞3次,收藏7次。关于服务的一些基本知识,包括活动对接口的方法调用,接口实现,服务生命周期等知识。_安卓服务
JDBC使用数据库连接池连接数据库(DBCP,C3P0,Druid)_采用连接池方式连接数据库-程序员宅基地
文章浏览阅读7.9k次,点赞5次,收藏8次。小白式数据库连接池使用,看完拿捏数据库连接池。_采用连接池方式连接数据库
C++多线程同步_c++线程同步-程序员宅基地
文章浏览阅读4.9k次,点赞5次,收藏36次。摘要:本文介绍了C++11中如何开启新线程,并详细讲解了线程的基础同步原语:mutex, lock_guard, unique_lock, condition variable和semaphore等。如何采用async, packaged_task和promise实现future同步机制?怎样处理spurious wakeup?本文以质数判定服务为例为大家分享C++多线程同步措施!1. C++线程和基础同步原语Thread mutex, lock_guard, unique_lock con._c++线程同步
STM32 GPIOx通用输入输出I/O端口的BSRR寄存器与BRR功能简述_gpiob->brr-程序员宅基地
文章浏览阅读3.3k次,点赞4次,收藏9次。STM32 GPIOx通用输入输出I/O端口的BSRR寄存器与BRR功能简述_gpiob->brr
随便推点
(转)30 IMP-00019: row rejected due to ORACLE error 12899-程序员宅基地
文章浏览阅读590次。IMP-00019: row rejected due to ORACLE error 12899IMP-00003: ORACLE error 12899 encounteredORA-12899: value too large for column "CRM"."BK_ECS_ORDER_INFO_00413"."POSTSCRIPT" (actual: 895, maximum..._row rejected due to oracle
降低Nginx代理服务器的磁盘IO使用率,提高转发性能_nginx tcp转发 硬盘io-程序员宅基地
文章浏览阅读918次。目前很多Web的项目在部署的时候会采用Nginx做为前端的反向代理服务器,后端会部署很多业务处理服务器,通常情况下Nginx代理服务器部署的还是比较少,而且其以高效性能著称,几万的并发连接处理速度都不在话下。然而去年的时候,我们的线上系统也采用类似的部署结构,同时由于我们的业务需求,Nginx的部署环境在虚拟机上面,复用了其他虚拟机的整体磁盘,在高IO消耗的场景中,我们发现Nginx的磁盘_nginx tcp转发 硬盘io
Activiti 开发环境搭建_antdev activity-程序员宅基地
文章浏览阅读645次。Activiti 开发环境的搭建非常简单,主要分为 Activiti runtime 的安装以及 Eclipse 开发环境的配置。本文以 Windows 平台为例介绍 Activiti 5.8 版的开发环境的搭建配置过程。Activiti 的运行时程序可以从http://www.activiti.org/download.html 下载,目前最新版本为 5.8。为了配置使用 Activ_antdev activity
Vuex: 实现同级组件的简单通信_vuex的组件同级通信-程序员宅基地
文章浏览阅读2.3k次。1. Vuex 是什么?Vuex 是专门为Vue 组件化思想带来的组件间通信问题提供的解决方案,主要解决以下两个问题:多个视图依赖于同一状态 来自不同视图的行为需要变更同一状态2. 核心概念State: 可以简单理解为Vue 维持的全局变量(状态)。 Getter: 获取State 中的状态的方法,可以在取出前对数据进行二次处理。 Mutation: 是改变State 中的状态..._vuex的组件同级通信
逆向中常见的Hash算法和对称加密算法的分析_findcrypt3 支持哪些算法-程序员宅基地
文章浏览阅读8.4k次,点赞31次,收藏33次。逆向中常常出现一些加密算法,如果我们能对这些加密算法进行快速识别则会大大减少我们逆向的难度,虽然IDA已有密码分析神器Findcrypt,但掌握手动分析方法能帮助我们应对更多的情况。这篇文章将介绍逆向中常见的单项散列算法和对称加密算法的识别方法。0xFF. 前言在很长一段时间里我经常发现自己面对复杂的加密算法无从下手,可能是因为还没有系统学过密码学吧orz,总之这个问题困扰了我很久。于是最近我花了一些时间来解决自己在密码学这块的薄弱点,写下这篇文章的目的之一也是为了巩固所学知识。加密算法的部分没有_findcrypt3 支持哪些算法
smplayer_Windows上的SMPlayer入门(更好地播放电影)-程序员宅基地
文章浏览阅读5.3k次。smplayerThere are lots of video players out there, but one that we think gets overlooked is SMPlayer. It can do anything other video players can do and even more – like remembering where you left off ..._sm69影视