OPEN3D学习笔记(一)——File IO & Point Cloud_open3d c++ 绘制 lineset-程序员宅基地
技术标签: open3d
OPEN3D学习笔记(一)
安装
这个在linux下,按照官方教程给的提示,没出问题。其中换了清华镜像源可以快一点。
File IO
Pointcloud
print("Testing IO for point cloud ...")
pcd = o3d.io.read_point_cloud("../../TestData/fragment.pcd")
print(pcd) # 可以打印这个点云的点数
o3d.io.write_point_cloud("copy_of_fragment.pcd", pcd)
# 输出如下
#Testing IO for point cloud ...
#geometry::PointCloud with 113662 points.
点云(PointCloud的一些格式):
xyz:每行包含xyz的3个坐标值
xyzn:每行都是x, y, z, xn, yn, zn.坐标值和法线值6个值
xyzrgb:每行也是6个值,其中rgb都是[0, 1]的范围内
pts:第一行是代表点数的整数。随后的每一行都包含[x,y,z,i,r,g,b],其中r,g,b是uint8
ply:
pcd:
# 这里明确了文件的类型,那么文件的后缀则被忽略
pcd = o3d.io.read_point_cloud("../../TestData/my_points.txt", format='xyz')
Mesh
print("Testing IO for meshes ...")
mesh = o3d.io.read_triangle_mesh("../../TestData/knot.ply")
print(mesh) # 打印点数和三角面数
o3d.io.write_triangle_mesh("copy_of_knot.ply", mesh)
# 输出
#Testing IO for meshes ...
#geometry::TriangleMesh with 1440 points and 2880 triangles.
一些格式:
ply,stl,obj,off,gltf
Image
print("Testing IO for images ...")
img = o3d.io.read_image("../../TestData/lena_color.jpg")
print(img) # 打印图片的大小和通道数
o3d.io.write_image("copy_of_lena_color.jpg", img)
# 输出
#Testing IO for images ...
#Image of size 512x512, with 3 channels.
#Use numpy.asarray to access buffer data.
PointCloud
可视化点云
print("Load a ply point cloud, print it, and render it")
pcd = o3d.io.read_point_cloud("../../TestData/fragment.ply")
print(pcd)
print(np.asarray(pcd.points))
o3d.visualization.draw_geometries([pcd], zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024])
#我实现的时候报错,是版本不对吗?我的库函数是:def draw_geometries(geometry_list, window_name='Open3D', width=1920, height=1080, left=50, top=50, point_show_normal=False, mesh_show_wireframe=False, mesh_show_back_face=False)
'''
Load a ply point cloud, print it, and render it
geometry::PointCloud with 196133 points.
[[0.65234375 0.84686458 2.37890625]
[0.65234375 0.83984375 2.38430572]
[0.66737998 0.83984375 2.37890625]
...
[2.00839925 2.39453125 1.88671875]
[2.00390625 2.39488506 1.88671875]
[2.00390625 2.39453125 1.88793314]]
'''
read_point_cloud从文件读取点云。它尝试根据扩展名对文件进行解码。支持的扩展名是:pcd,ply,xyz,xyzrgb,xyzn,pts。
draw_geometries可视化点云。使用鼠标/触控板从不同的角度查看几何。按h键以打印出该GUI的完整键盘说明列表。
体素降采样
该算法的两个步骤:
1.点被存储到体素中。
2.每个占用的体素通过平均内部的所有点来生成精确的一个点。
print("Downsample the point cloud with a voxel of 0.05")
downpcd = pcd.voxel_down_sample(voxel_size=0.05) # 设定体素大小
o3d.visualization.draw_geometries([downpcd], zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024]) # 可视化
顶点法线估计
可视化的时候,按n查看法线。键-和键+可用于控制法线的长度。
print("Recompute the normal of the downsampled point cloud")
downpcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=30)) // 设定估计法线的参数,搜索方法是kdtree(半径0.1米,最大邻居数量30)
o3d.visualization.draw_geometries([downpcd], zoom=0.3412,
front=[0.4257, -0.2125, -0.8795],
lookat=[2.6172, 2.0475, 1.532],
up=[-0.0694, -0.9768, 0.2024],
point_show_normal=True)
estimate_normals计算每个点的法线。该函数查找相邻点并使用协方差分析计算相邻点的主轴线(法线)。
法线有两个方向,open3d尝试与现有的方向对齐,也可以调用orient_normals_to_align_with_direction 和orient_normals_towards_camera_location。
访问估计的顶点法线
print("Print a normal vector of the 0th point")
print(downpcd.normals[0]) # 调用这个变量的属性
'''
输出第一个法向量的值
Print a normal vector of the 0th point
[-0.21838377 -0.94240442 -0.25334252]
'''
print("Print the normal vectors of the first 10 points")
print(np.asarray(downpcd.normals)[:10, :]) # 转换成numpy
'''
Print the normal vectors of the first 10 points
[[-0.21838377 -0.94240442 -0.25334252]
[-0.39147152 -0.43746664 -0.8095511 ]
[-0.00694405 -0.99478075 -0.10179902]
[-0.00399871 -0.99965423 -0.02598917]
[-0.93768261 -0.07378998 0.3395679 ]
[-0.43476205 -0.62438493 -0.64894177]
[-0.09739809 -0.9928602 -0.06886388]
[-0.11728718 -0.95516445 -0.27185399]
[-0.01038945 -0.99968858 -0.02268921]
[-0.00816546 -0.99965616 -0.02491762]]
'''
修剪点云
print("Load a polygon volume and use it to crop the original point cloud")
vol = o3d.visualization.read_selection_polygon_volume("../../TestData/Crop/cropped.json")
chair = vol.crop_point_cloud(pcd)
o3d.visualization.draw_geometries([chair], zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])
read_selection_polygon_volume读取一个指定多边形选择区域的json文件。根据这个指定区域,裁剪点云
vol.crop_point_cloud(pcd)过滤出点。只剩下椅子了。
涂颜色
print("Paint chair")
chair.paint_uniform_color([1, 0.706, 0])
o3d.visualization.draw_geometries([chair], zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])
paint_uniform_color将所有点绘制为统一的颜色。颜色在[0,1]范围的RGB空间中。
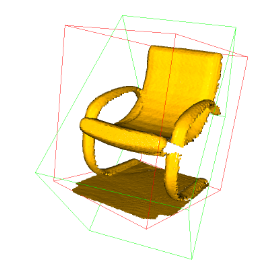
边界体积
Open3D实现了AxisAlignedBoundingBox和OrientedBoundingBox,它们也可以用于裁剪几何。
aabb = chair.get_axis_aligned_bounding_box()
aabb.color = (1,0,0)
obb = chair.get_oriented_bounding_box()
obb.color = (0,1,0)
o3d.visualization.draw_geometries([chair, aabb, obb], zoom=0.7,
front=[0.5439, -0.2333, -0.8060],
lookat=[2.4615, 2.1331, 1.338],
up=[-0.1781, -0.9708, 0.1608])
凸包
点云的凸包是包含所有点的最小凸集。Open3D包含方法compute_convex_hull,该方法计算例如点云的凸包。该实现基于Qhull
在下面的示例代码中,我们首先从网格中采样点云,然后计算作为三角形网格返回的凸包。然后,我们将凸包可视化为红色LineSet。
pcl = o3dtut.get_bunny_mesh().sample_points_poisson_disk(number_of_points=2000)
hull, _ = pcl.compute_convex_hull()
hull_ls = o3d.geometry.LineSet.create_from_triangle_mesh(hull)
hull_ls.paint_uniform_color((1, 0, 0))
o3d.visualization.draw_geometries([pcl, hull_ls])
基于密度的聚类算法DBSCAN
例如,给定一个来自深度传感器的点云,我们希望将局部点云分组在一起。
函数cluster_dbscan,eps定义到群集中邻居的距离,min_points定义形成群集所需的最小点数。该函数返回labels,其中labels=-1表示噪音。
pcd = o3d.io.read_point_cloud("../../TestData/fragment.ply")
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
labels = np.array(pcd.cluster_dbscan(eps=0.02, min_points=10, print_progress=True))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd], zoom=0.455,
front=[-0.4999, -0.1659, -0.8499],
lookat=[2.1813, 2.0619, 2.0999],
up=[0.1204, -0.9852, 0.1215])
# 输出point cloud has 10 clusters
# label=0则为第0类。。。
平面分割
函数segement_plane,有3个参数:
distance_threshold定义了一个点到一个估计平面的最大距离,在最大距离内被视为一个内点,
ransac_n定义随机采样以估计平面的点数,
num_iterations定义对随机平面进行采样和验证的频率。
该函数返回(a,b,c,d)一个平面的参数(ax+by+cz+d=0)
该函数进一步返回一个内点索引列表
pcd = o3d.io.read_point_cloud("../../TestData/fragment.pcd")
plane_model, inliers = pcd.segment_plane(distance_threshold=0.01,
ransac_n=3,
num_iterations=1000)
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
inlier_cloud = pcd.select_by_index(inliers) # 利用索引来提取内点
inlier_cloud.paint_uniform_color([1.0, 0, 0]) # 设置红色
outlier_cloud = pcd.select_by_index(inliers, invert=True)
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud], zoom=0.8,
front=[-0.4999, -0.1659, -0.8499],
lookat=[2.1813, 2.0619, 2.0999],
up=[0.1204, -0.9852, 0.1215])
#输出
#Plane equation: -0.06x + -0.10y + 0.99z + -1.06 = 0
隐藏点删除(不懂)
print("Convert mesh to a point cloud and estimate dimensions")
pcd = o3dtut.get_armadillo_mesh().sample_points_poisson_disk(5000)
diameter = np.linalg.norm(np.asarray(pcd.get_max_bound()) - np.asarray(pcd.get_min_bound()))
o3d.visualization.draw_geometries([pcd])
print("Define parameters used for hidden_point_removal")
camera = [0, 0, diameter]
radius = diameter * 100
print("Get all points that are visible from given view point")
_, pt_map = pcd.hidden_point_removal(camera, radius)
print("Visualize result")
pcd = pcd.select_by_index(pt_map)
o3d.visualization.draw_geometries([pcd])
智能推荐
oracle 12c 集群安装后的检查_12c查看crs状态-程序员宅基地
文章浏览阅读1.6k次。安装配置gi、安装数据库软件、dbca建库见下:http://blog.csdn.net/kadwf123/article/details/784299611、检查集群节点及状态:[root@rac2 ~]# olsnodes -srac1 Activerac2 Activerac3 Activerac4 Active[root@rac2 ~]_12c查看crs状态
解决jupyter notebook无法找到虚拟环境的问题_jupyter没有pytorch环境-程序员宅基地
文章浏览阅读1.3w次,点赞45次,收藏99次。我个人用的是anaconda3的一个python集成环境,自带jupyter notebook,但在我打开jupyter notebook界面后,却找不到对应的虚拟环境,原来是jupyter notebook只是通用于下载anaconda时自带的环境,其他环境要想使用必须手动下载一些库:1.首先进入到自己创建的虚拟环境(pytorch是虚拟环境的名字)activate pytorch2.在该环境下下载这个库conda install ipykernelconda install nb__jupyter没有pytorch环境
国内安装scoop的保姆教程_scoop-cn-程序员宅基地
文章浏览阅读5.2k次,点赞19次,收藏28次。选择scoop纯属意外,也是无奈,因为电脑用户被锁了管理员权限,所有exe安装程序都无法安装,只可以用绿色软件,最后被我发现scoop,省去了到处下载XXX绿色版的烦恼,当然scoop里需要管理员权限的软件也跟我无缘了(譬如everything)。推荐添加dorado这个bucket镜像,里面很多中文软件,但是部分国外的软件下载地址在github,可能无法下载。以上两个是官方bucket的国内镜像,所有软件建议优先从这里下载。上面可以看到很多bucket以及软件数。如果官网登陆不了可以试一下以下方式。_scoop-cn
Element ui colorpicker在Vue中的使用_vue el-color-picker-程序员宅基地
文章浏览阅读4.5k次,点赞2次,收藏3次。首先要有一个color-picker组件 <el-color-picker v-model="headcolor"></el-color-picker>在data里面data() { return {headcolor: ’ #278add ’ //这里可以选择一个默认的颜色} }然后在你想要改变颜色的地方用v-bind绑定就好了,例如:这里的:sty..._vue el-color-picker
迅为iTOP-4412精英版之烧写内核移植后的镜像_exynos 4412 刷机-程序员宅基地
文章浏览阅读640次。基于芯片日益增长的问题,所以内核开发者们引入了新的方法,就是在内核中只保留函数,而数据则不包含,由用户(应用程序员)自己把数据按照规定的格式编写,并放在约定的地方,为了不占用过多的内存,还要求数据以根精简的方式编写。boot启动时,传参给内核,告诉内核设备树文件和kernel的位置,内核启动时根据地址去找到设备树文件,再利用专用的编译器去反编译dtb文件,将dtb还原成数据结构,以供驱动的函数去调用。firmware是三星的一个固件的设备信息,因为找不到固件,所以内核启动不成功。_exynos 4412 刷机
Linux系统配置jdk_linux配置jdk-程序员宅基地
文章浏览阅读2w次,点赞24次,收藏42次。Linux系统配置jdkLinux学习教程,Linux入门教程(超详细)_linux配置jdk
随便推点
matlab(4):特殊符号的输入_matlab微米怎么输入-程序员宅基地
文章浏览阅读3.3k次,点赞5次,收藏19次。xlabel('\delta');ylabel('AUC');具体符号的对照表参照下图:_matlab微米怎么输入
C语言程序设计-文件(打开与关闭、顺序、二进制读写)-程序员宅基地
文章浏览阅读119次。顺序读写指的是按照文件中数据的顺序进行读取或写入。对于文本文件,可以使用fgets、fputs、fscanf、fprintf等函数进行顺序读写。在C语言中,对文件的操作通常涉及文件的打开、读写以及关闭。文件的打开使用fopen函数,而关闭则使用fclose函数。在C语言中,可以使用fread和fwrite函数进行二进制读写。 Biaoge 于2024-03-09 23:51发布 阅读量:7 ️文章类型:【 C语言程序设计 】在C语言中,用于打开文件的函数是____,用于关闭文件的函数是____。
Touchdesigner自学笔记之三_touchdesigner怎么让一个模型跟着鼠标移动-程序员宅基地
文章浏览阅读3.4k次,点赞2次,收藏13次。跟随鼠标移动的粒子以grid(SOP)为partical(SOP)的资源模板,调整后连接【Geo组合+point spirit(MAT)】,在连接【feedback组合】适当调整。影响粒子动态的节点【metaball(SOP)+force(SOP)】添加mouse in(CHOP)鼠标位置到metaball的坐标,实现鼠标影响。..._touchdesigner怎么让一个模型跟着鼠标移动
【附源码】基于java的校园停车场管理系统的设计与实现61m0e9计算机毕设SSM_基于java技术的停车场管理系统实现与设计-程序员宅基地
文章浏览阅读178次。项目运行环境配置:Jdk1.8 + Tomcat7.0 + Mysql + HBuilderX(Webstorm也行)+ Eclispe(IntelliJ IDEA,Eclispe,MyEclispe,Sts都支持)。项目技术:Springboot + mybatis + Maven +mysql5.7或8.0+html+css+js等等组成,B/S模式 + Maven管理等等。环境需要1.运行环境:最好是java jdk 1.8,我们在这个平台上运行的。其他版本理论上也可以。_基于java技术的停车场管理系统实现与设计
Android系统播放器MediaPlayer源码分析_android多媒体播放源码分析 时序图-程序员宅基地
文章浏览阅读3.5k次。前言对于MediaPlayer播放器的源码分析内容相对来说比较多,会从Java-&amp;gt;Jni-&amp;gt;C/C++慢慢分析,后面会慢慢更新。另外,博客只作为自己学习记录的一种方式,对于其他的不过多的评论。MediaPlayerDemopublic class MainActivity extends AppCompatActivity implements SurfaceHolder.Cal..._android多媒体播放源码分析 时序图
java 数据结构与算法 ——快速排序法-程序员宅基地
文章浏览阅读2.4k次,点赞41次,收藏13次。java 数据结构与算法 ——快速排序法_快速排序法