ThreadX在mdk(AC5)中的移植_threadx移植-程序员宅基地
1.ThreadX简介
Threadx是由 Express Logic 公司开发的一款实时操作系统(RTOS),2019年被微软收购,成为了微软的一款Azure RTOS。在2020年,ThreadX也加入了开源大军,将ThreadX内核及其各大组件开源免费。
ThreadX可以说是一款发展非常迅猛的RTOS,相信最近两年有了解它的朋友都能理解。
- 2019年:被微软收购;
- 2020年:免费开源;
- 2021年:上线中文版手册;
ThreadX陆续上线了全中文手册,地址:Azure RTOS ThreadX 文档
中文手册包含:ThreadX内核文档,以及各大组件文档:FileX、 GUIX、 USBX、 NetX、 LevelX、 TraceX等。
2.说明
本文基于threadx-6.2.1_rel版本,介绍ThreadX在cortex-M7上的移植。
3.移植过程
3.1.获取threadx源码
直接从github上获取最新的release版本:threadx_release。
threadx的文件结构如下:
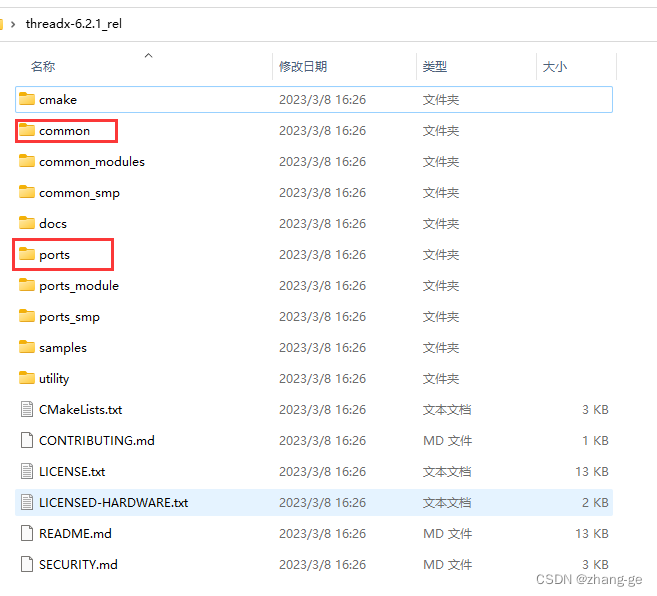
移植过程中,主要使用到ports和common两个文件夹。
3.2.移植步骤
-
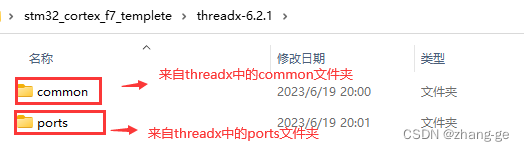
1.在自己的工程中创建
threadx-6.2.1文件夹,将threadx源码的ports和common文件夹拷贝到threadx-6.2.1中。
-
2.添加源码到MDK工程
-
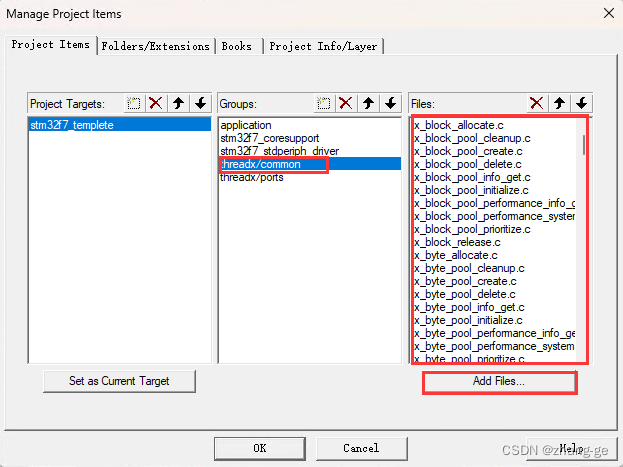
2.1 新建threadx/common分组,添加threadx-6.2.1/common/src下的所有c文件:
-
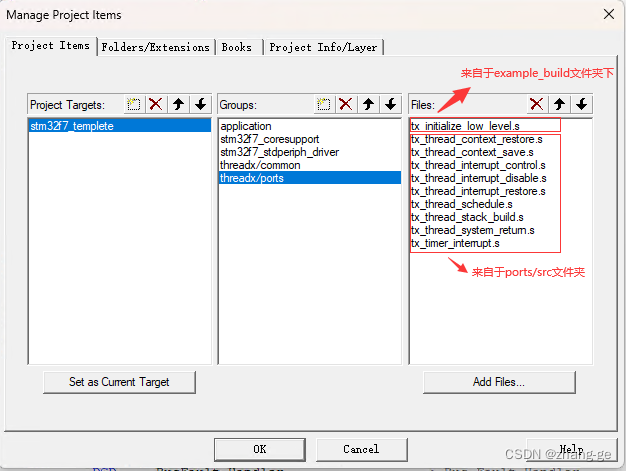
2.2.新建threadx/ports分组,并添加源码到工程
此时需要根据编译环境来选择,我使用的是mdk的ac5编译器,则添加:
threadx-6.2.1\ports\cortex_m7\ac5\src 下的所有 .s 文件和
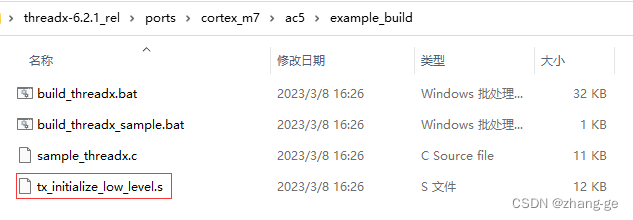
threadx-6.2.1\ports\cortex_m7\ac5\example_build\tx_initialize_low_level.s文件(将其也复制到ports\cortex_m7\ac5\src下):
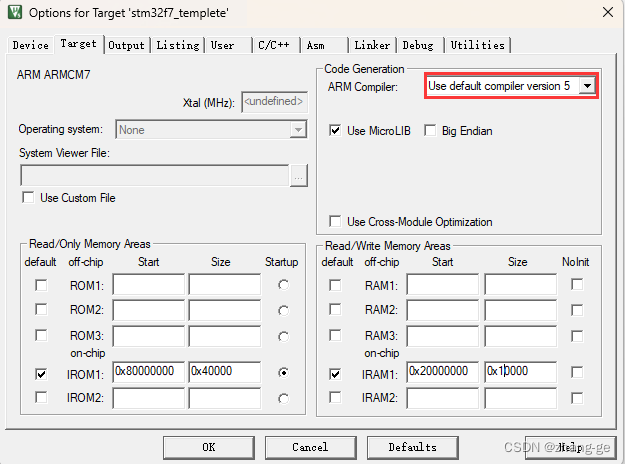
设置使用ac5编译器:
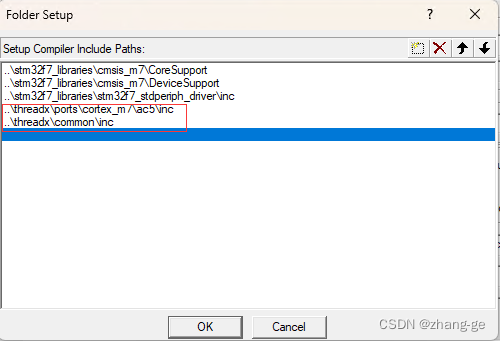
添加头文件路径:
-
-
3.修改适配底层文件
- 3.1.
tx_initialize_low_level.s
threadx官方的example_build中提供了一个底层适配文件tx_initialize_low_level.s,所在位置如图:
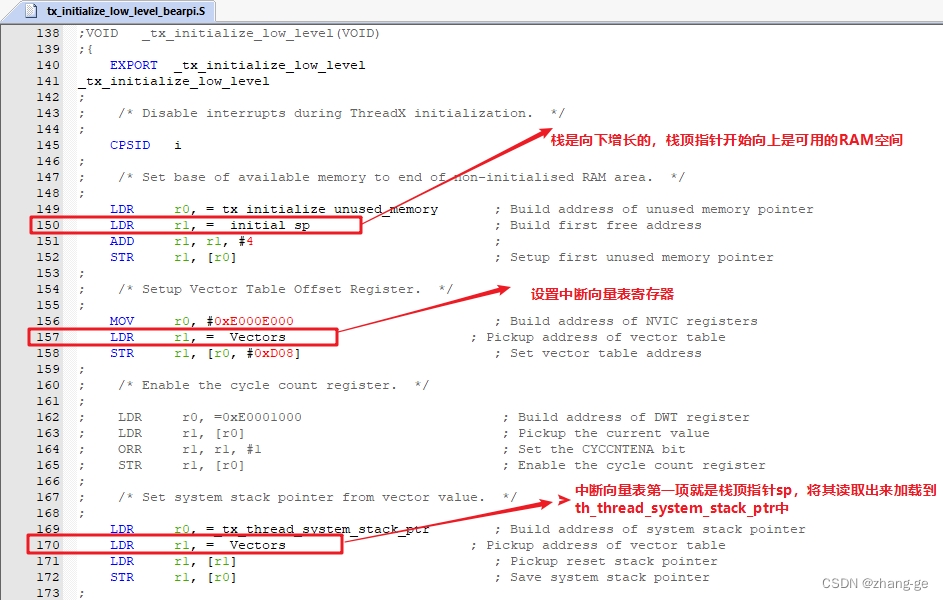
这个文件中实现了_tx_initialize_low_level()函数,该函数用于完成处理器的底层初始化,包括:- 设置中断向量表
- 设置用于产生时钟节拍的定位器(Systick)
- 保存系统栈顶指针给中断程序使用
- 寻找RAM中首块可用地址传入tx_application_define函数供使用,也就是first_unused_memory指针的值
- 3.1.
从文件的实现来看,threadx想用这个文件接管原有cortex-m7的启动文件,但是其接管的启动文件只实现了中断向量表的一部分,并不能完全拿来使用。因此,为了不对原有的启动文件造成影响,需要对此文件做修改,改动如下:
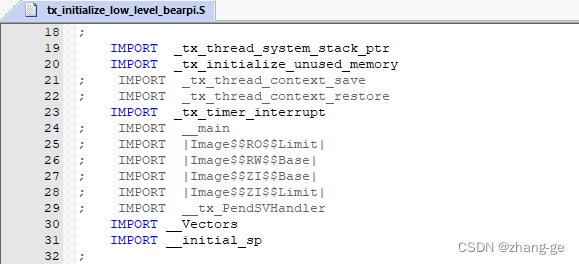
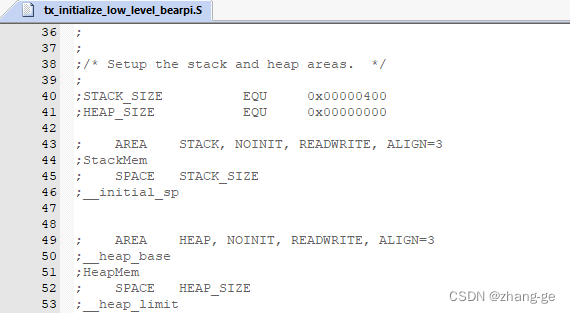
① 将没有用到的标号注释,手动添加_Vectors和__initial_sp标号,分别是启动文件中导出的中断向量表和栈顶指针初始值:
② 设置时钟频率(80Mhz)和时钟节拍(1ms),该值用来初始化Systick定时器:

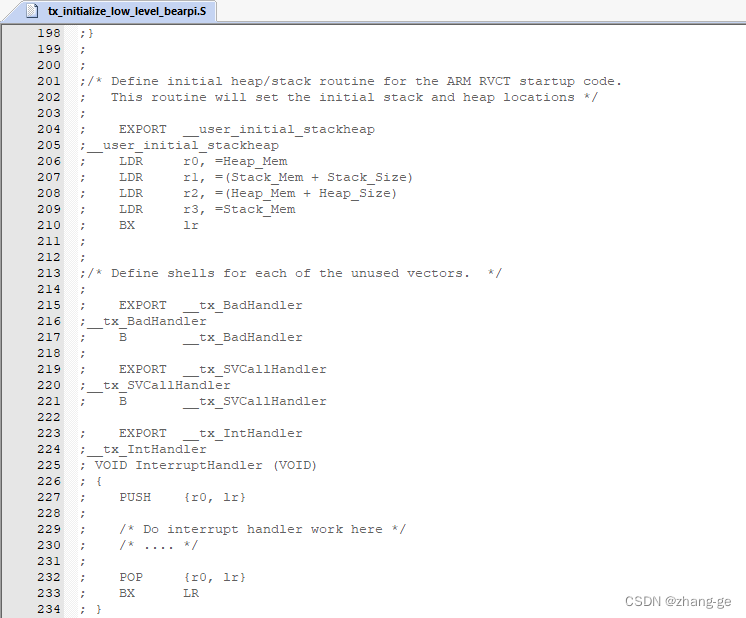
③ 将设置堆栈的代码全部注释(堆栈已经在启动文件中设置了)
④ 将 threadx 定义的中断向量表全部注释(使用启动文件中定义的向量表):
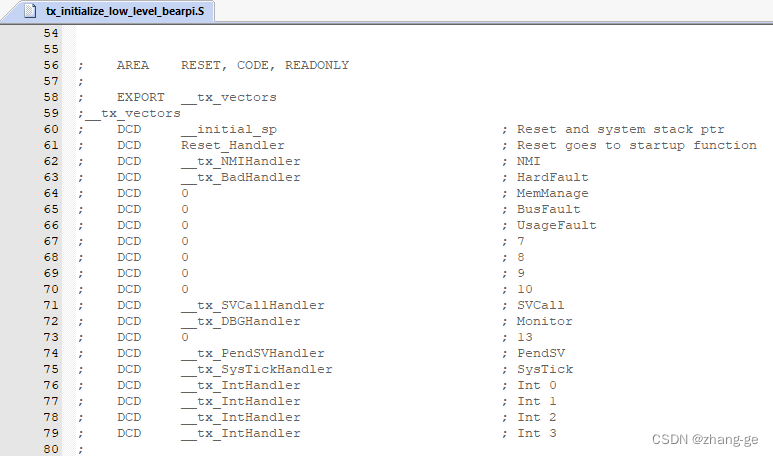
⑤ 注释threadx定义的复位处理程序(使用启动文件中的复位程序):
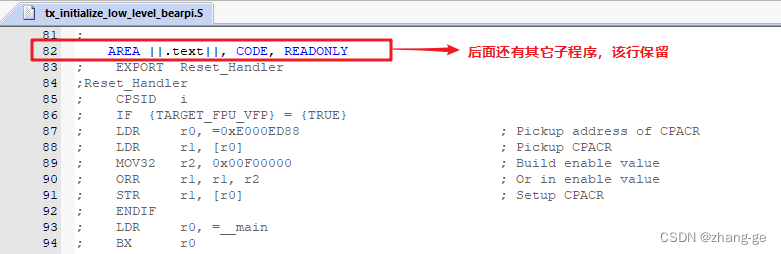
⑥ 修改threadx底层初始化函数:
⑦ 注释用不到的函数:
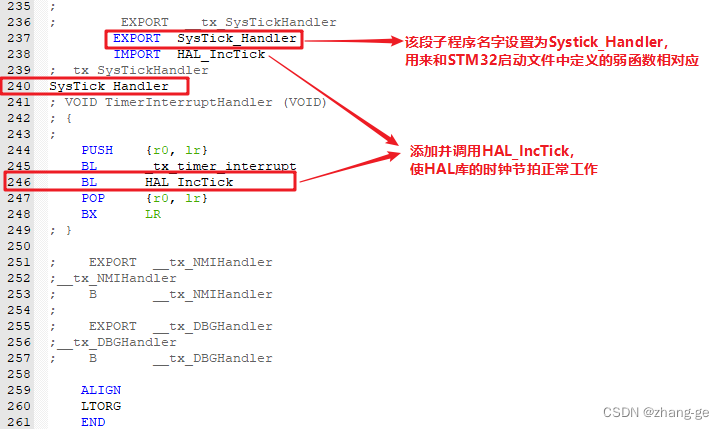
⑧ 处理Systick中断函数:
比较纯净的文件如下:
;/**************************************************************************/
;/* */
;/* Copyright (c) Microsoft Corporation. All rights reserved. */
;/* */
;/* This software is licensed under the Microsoft Software License */
;/* Terms for Microsoft Azure RTOS. Full text of the license can be */
;/* found in the LICENSE file at https://aka.ms/AzureRTOS_EULA */
;/* and in the root directory of this software. */
;/* */
;/**************************************************************************/
;
;
;/**************************************************************************/
;/**************************************************************************/
;/** */
;/** ThreadX Component */
;/** */
;/** Initialize */
;/** */
;/**************************************************************************/
;/**************************************************************************/
;
;
IMPORT _tx_thread_system_stack_ptr
IMPORT _tx_initialize_unused_memory
IMPORT _tx_thread_context_save
IMPORT _tx_thread_context_restore
IMPORT _tx_timer_interrupt
IMPORT __tx_PendSVHandler
IMPORT __Vectors
IMPORT __initial_sp
;
;
SYSTEM_CLOCK EQU 80000000
SYSTICK_CYCLES EQU ((SYSTEM_CLOCK / 1000) -1)
;
AREA ||.text||, CODE, READONLY
;/**************************************************************************/
;/* */
;/* FUNCTION RELEASE */
;/* */
;/* _tx_initialize_low_level Cortex-M7/AC5 */
;/* 6.1 */
;/* AUTHOR */
;/* */
;/* William E. Lamie, Microsoft Corporation */
;/* */
;/* DESCRIPTION */
;/* */
;/* This function is responsible for any low-level processor */
;/* initialization, including setting up interrupt vectors, setting */
;/* up a periodic timer interrupt source, saving the system stack */
;/* pointer for use in ISR processing later, and finding the first */
;/* available RAM memory address for tx_application_define. */
;/* */
;/* INPUT */
;/* */
;/* None */
;/* */
;/* OUTPUT */
;/* */
;/* None */
;/* */
;/* CALLS */
;/* */
;/* None */
;/* */
;/* CALLED BY */
;/* */
;/* _tx_initialize_kernel_enter ThreadX entry function */
;/* */
;/* RELEASE HISTORY */
;/* */
;/* DATE NAME DESCRIPTION */
;/* */
;/* 09-30-2020 William E. Lamie Initial Version 6.1 */
;/* */
;/**************************************************************************/
;VOID _tx_initialize_low_level(VOID)
;{
EXPORT _tx_initialize_low_level
_tx_initialize_low_level
;
; /* Disable interrupts during ThreadX initialization. */
;
CPSID i
;
; /* Set base of available memory to end of non-initialised RAM area. */
;
LDR r0, =_tx_initialize_unused_memory ; Build address of unused memory pointer
LDR r1, =__initial_sp ; Build first free address
ADD r1, r1, #4 ;
STR r1, [r0] ; Setup first unused memory pointer
;
; /* Setup Vector Table Offset Register. */
;
MOV r0, #0xE000E000 ; Build address of NVIC registers
LDR r1, =__Vectors ; Pickup address of vector table
STR r1, [r0, #0xD08] ; Set vector table address
;
; /* Enable the cycle count register. */
;
; LDR r0, =0xE0001000 ; Build address of DWT register
; LDR r1, [r0] ; Pickup the current value
; ORR r1, r1, #1 ; Set the CYCCNTENA bit
; STR r1, [r0] ; Enable the cycle count register
;
; /* Set system stack pointer from vector value. */
;
LDR r0, =_tx_thread_system_stack_ptr ; Build address of system stack pointer
LDR r1, =__Vectors ; Pickup address of vector table
LDR r1, [r1] ; Pickup reset stack pointer
STR r1, [r0] ; Save system stack pointer
;
; /* Configure SysTick. */
;
MOV r0, #0xE000E000 ; Build address of NVIC registers
LDR r1, =SYSTICK_CYCLES
STR r1, [r0, #0x14] ; Setup SysTick Reload Value
MOV r1, #0x7 ; Build SysTick Control Enable Value
STR r1, [r0, #0x10] ; Setup SysTick Control
;
; /* Configure handler priorities. */
;
LDR r1, =0x00000000 ; Rsrv, UsgF, BusF, MemM
STR r1, [r0, #0xD18] ; Setup System Handlers 4-7 Priority Registers
LDR r1, =0xFF000000 ; SVCl, Rsrv, Rsrv, Rsrv
STR r1, [r0, #0xD1C] ; Setup System Handlers 8-11 Priority Registers
; Note: SVC must be lowest priority, which is 0xFF
LDR r1, =0x40FF0000 ; SysT, PnSV, Rsrv, DbgM
STR r1, [r0, #0xD20] ; Setup System Handlers 12-15 Priority Registers
; Note: PnSV must be lowest priority, which is 0xFF
;
; /* Return to caller. */
;
BX lr
;}
EXPORT __tx_SysTickHandler
EXPORT SysTick_Handler
__tx_SysTickHandler
SysTick_Handler
; VOID TimerInterruptHandler (VOID)
; {
;
PUSH {r0, lr}
BL _tx_timer_interrupt
POP {r0, lr}
BX LR
; }
ALIGN
LTORG
END
- 3.2.注释stm32库提供的中断函数
① 去除原有stm32f7xx_it.c中的 PendSV 和 Systick 中断服务函数:
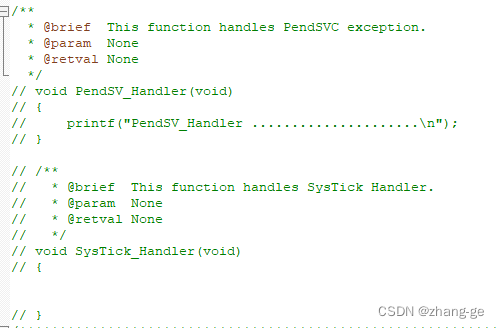
至此,移植完成。
4.编写应用代码
在main.c中编写两个任务,然后在tx_application_define中创建这两个任务:
#include <stdio.h>
#include "tx_api.h"
#include "main.h"
#define THREAD1_PRIO 3
#define THREAD1_STACK_SIZE 1024
static TX_THREAD thread1;
uint8_t thread1_stack[THREAD1_STACK_SIZE];
#define THREAD2_PRIO 2
#define THREAD2_STACK_SIZE 1024
static TX_THREAD thread2;
uint8_t thread2_stack[THREAD2_STACK_SIZE];
void my_thread1_entry(ULONG thread_input)
{
/* Enter into a forever loop. */
while(1)
{
printf("threadx 1 application running...\r\n");
/* Sleep for 1000 tick. */
tx_thread_sleep(1000);
}
}
void my_thread2_entry(ULONG thread_input)
{
/* Enter into a forever loop. */
while(1)
{
printf("threadx 2 application running...\r\n");
/* Sleep for 1000 tick. */
tx_thread_sleep(1000);
}
}
void tx_application_define(void *first_unused_memory)
{
/* Create thread */
tx_thread_create(&thread1, "thread 1", my_thread1_entry, 0, &thread1_stack[0], THREAD1_STACK_SIZE, THREAD1_PRIO, THREAD1_PRIO, TX_NO_TIME_SLICE, TX_AUTO_START);
tx_thread_create(&thread2, "thread 2", my_thread2_entry, 0, &thread2_stack[0], THREAD2_STACK_SIZE, THREAD2_PRIO, THREAD2_PRIO, TX_NO_TIME_SLICE, TX_AUTO_START);
}
在main()函数中启动threadx内核:
#include <stdio.h>
#include "tx_api.h"
void main(void)
{
SystemClockConfig();
UART_init(USART0, 115200, USART_WordLength_8b, USART_StopBits_1b, USART_Parity_No);
tx_kernel_enter( );
}
至此,应用程序编写完成,可以编译、下载,运行,进行测试了。
智能推荐
【政考网答疑】为什么公务员招录限制35岁以下?-程序员宅基地
文章浏览阅读937次。政考网每日一答,今日咱们讨论的问题是为什么公务员招录限制35岁以下?众所周知,无论是各地省考还是国考,均会要求考生年龄在18周岁以上、35周岁以下(应届硕士和博士经招录机关同意,可放宽到40岁),那么,公务员招录考试为何会限制35岁以下报考呢?这样的要求是否合理?1、高龄人员的可塑性相对不强相比较应届毕业生或者刚毕业不久的大学生,35以上的考生在身体素质上的优势并不明显,特别是一些基层岗位,条件艰苦,高龄考生的岗位匹配度相对较低。古语云,“三十而立,四十而不惑。”高龄考生已从过...
物理驱动深度学习(PINN)代码_pinn代码-程序员宅基地
物理驱动深度学习(PINN)代码的摘要是:论文总结了相关代码,包括物理驱动深度学习框架和使用先验字典进行加速训练的改进代码。代码链接可在论文中找到。
025目标检测表情检测识别yolov5pyqt_python_yolov5表情识别 表情-程序员宅基地
文章浏览阅读198次。其中data文件夹下存放的图像数据集,包括alert(注意力集中)、non_vigilant(漫不经心)、tired(疲劳)等。运行02train.py会将txt文本中的图像数据读取进行模型的训练,最后保存在runs文件夹下。运行04pyqt界面.py会弹出一个可视化的ui界面,通过点击按钮检测自己感兴趣的图片。运行03detector_photo.py可以实现对单张图片的检测。运行01makeTxt.py会将数据集图片路径保存在txt文本中。_yolov5表情识别 表情
【Linux】Linux的消息队列_linux c消息队列例子-程序员宅基地
文章浏览阅读1w次,点赞3次,收藏43次。消息队列亦称报文队列,也叫做信箱。意思是说,这种通信机制传递的数据具有某种结构,而不是简单的字节流。消息队列的工作机制如下所示: 消息的结构用户空间的消息缓冲区为在进程与内核之间传递消息,无论发送进程还是接收进程,都需要在进程空间中用消息缓冲区来暂存消息。该消息缓冲区的结构定义如下:struct msgbuf { long mtype; /* 消息的类型..._linux c消息队列例子
软件安装:RPM、SRPM 与 YUM 功能_pgpool srpm 是什么-程序员宅基地
文章浏览阅读596次。一、Linux 界的两大主流:RPM 与 DPKG 目前在 Linux 界软件安装方式最常见的有两种,分别是: - dpkg:只要是派生于 Debian 的其它 Linux 大多使用 dpkg 这个机制来管理软件,包括 Ubuntu、B2D 等。 - RPM:CentOS、Red Hat 等都是使用它。二、什么是 RPM 与 SRPM RPM 全名是“RedHat Package Manag_pgpool srpm 是什么
运动学与动力学约束下的在线机器人时间最优轨迹规划算法-程序员宅基地
文章浏览阅读1.3k次,点赞23次,收藏33次。时间最优、轨迹规划、动力学约束、在线
随便推点
android最新扫描,Android下实现雷达扫描效果(学习)-程序员宅基地
文章浏览阅读412次。Android UI前几天看见一篇文章Android 雷达扫描动画效果实现 就学习了一下,在此做了笔记并做了一些修改自定义ScanRadar继承了View控件初始化几个画笔private void initPaint() {//用来绘画直线的画笔mPaintLine = new Paint(Paint.ANTI_ALIAS_FLAG); // 消除锯齿mPaintLine.setAntiAlias..._android雷达扫描设备效果
使用OpenCV进行直播(附代码)-程序员宅基地
文章浏览阅读961次。点击上方“小白学视觉”,选择加"星标"或“置顶”重磅干货,第一时间送达生活中我们不止一次地使用过直播,但从未想过如何通过编程实现。大家好,我们在这里向大家介绍如何使用OpenCV和pyth..._opencv直播
封装是面向对象编程中的一种核心概念,它是指将类的内部数据和方法组合到一个抽象的数据类型中-程序员宅基地
文章浏览阅读80次。对于类的外部用户来说,它们无法访问和修改类的内部数据,只能通过类的公共函数来调用和更新数据。这样,在类实现和修改时,可以避免对用户的影响,也避免了用户恶意直接访问和修改内部数据的情况发生。总之,封装是面向对象编程中的一种重要思想,它通过隐藏类的内部实现机制,对外部提供更安全、更可靠和更易用的接口来访问和使用类的属性和方法。封装是面向对象编程中的一种核心概念,它是指将类的内部数据和方法组合到一个抽象的数据类型中,并且对外部隐藏了类的内部实现机制,只提供外部接口来访问和使用类的属性和方法。
[DownUnderCTF 2022] crypto部分复现_enc = aes.new(key,aes.mode_ofb,iv=iv)-程序员宅基地
文章浏览阅读989次。DownUnderCTF 2022 crypto_enc = aes.new(key,aes.mode_ofb,iv=iv)
DataSnap数据库连接池,数据集对象池的应用_dstcpservertransport-程序员宅基地
文章浏览阅读3.9k次。传统的应用服务器的开发往往是在ServerMethods单元中拖放一堆TDataSet, TDaTaSetProvider控件,这是一个最简单粗暴的开发方向,往往会造成服务端程序文件的臃肿、服务运行期间内存资源消耗过大的问题。因此这种往应用服务器中拖放一堆TDataSet, TDaTaSetProvider控件的做法,非常的笨拙。我们可以通过使用对象池方法来改进之。一、数据库连接池:TConn_dstcpservertransport
计算机毕业设计之java+springboot基于vue的摄影跟拍预定管理系统-程序员宅基地
文章浏览阅读92次。系统权限按管理员、摄影师和用户这三类涉及用户划分。(a) 管理员;管理员使用本系统涉到的功能主要有:首页、个人中心、用户管理、摄影师管理、摄影跟拍管理、类别管理、周边商品管理、商品类型管理、跟拍预约管理、跟拍流程管理、成品信息管理、商品订单管理、系统管理等功能。(b)摄影师;摄影师使用本系统涉到的功能主要有:首页、个人中心、跟拍预约管理、跟拍流程管理、成品信息管理、商品订单管理等功能这个系统的功能结构设计如图所示。系统功能模块图。