三、MAVROS功能包的offboard模式控制例子_mavros_offboard_attctl_test.py-程序员宅基地
技术标签: PX4
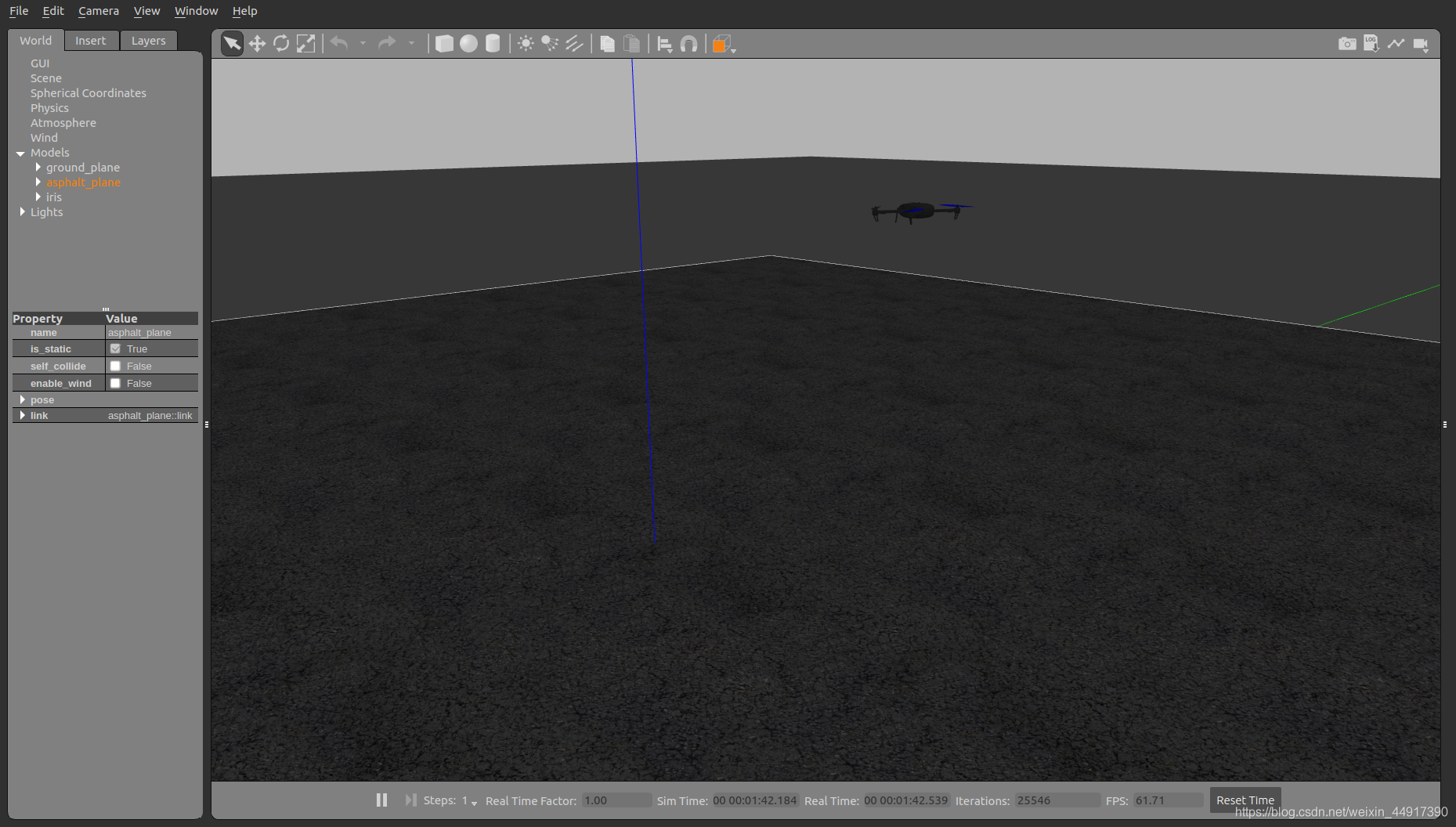
这里介绍了介绍了使用 Gazbo/SITL 中模拟的四轴飞行器 Offboard 控制的基础知识。
如何通过MAVROS功能包的offboard模式控制gazebo中的飞机起飞到高度两米。
主要过程:
要先解锁无人机,在切换无人机到offboard模式。 我们每隔五秒去检查一下与飞控的连接等是否一切正常。 在同一个循环中,我们按照指定的频率持续发送期望点信息给飞控。
官网教程:Macros 功能包的 offboard 模式控制例程
CSDN教程:mavros 外部控制例程
目录
一、建立工作空间以及功能包
1.新建工作空间
mkdir -p uav_test_ws/src
2.新建功能包
cd uav_test_ws/src
catkin_create_pkg offboard roscpp std_msgs geometry_msgs mavros_msgs
二、介绍C++代码控制方法
1.建一个cpp源文件用来作为这个功能包的执行文件
cd offboard/src
gedit offboard_node.cpp
2.然后把代码复制到这个文件里面,保存退出
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <mavros_msgs/State.h>
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//the setpoint publishing rate MUST be faster than 2Hz
ros::Rate rate(20.0);
// wait for FCU connection
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//send a few setpoints before starting
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
部分代码解析:
#include <ros/ros.h>
#include <geometry_msgs/PoseStamped.h>
#include <mavros_msgs/CommandBool.h>
#include <mavros_msgs/SetMode.h>
#include <masvros_msgs/State.h>
//mavros_msgs功能包中包含操作mavros包中服务和主题所需要的自定义消息文件(所以前面在创建功能包的时候就加入了那两个功能包)
mavros_msgs::State current_state;
void state_cb(const mavros_msgs::State::ConstPtr& msg){
current_state = *msg;
}
//我们创建一个简单的回调函数来存储飞控当前的状态。这将使得我们可以检测飞机的各项状态,比如是否连接上mavros功能包、是否解锁、当前模式
int main(int argc, char **argv)
{
ros::init(argc, argv, "offb_node");
ros::NodeHandle nh;
ros::Subscriber state_sub = nh.subscribe<mavros_msgs::State>
("mavros/state", 10, state_cb);
ros::Publisher local_pos_pub = nh.advertise<geometry_msgs::PoseStamped>
("mavros/setpoint_position/local", 10);
ros::ServiceClient arming_client = nh.serviceClient<mavros_msgs::CommandBool>
("mavros/cmd/arming");
ros::ServiceClient set_mode_client = nh.serviceClient<mavros_msgs::SetMode>
("mavros/set_mode");
//我们初始化了一个发布者来发布本地的控制指令,还按初始化了请求解锁和更改模式的服务。这节点的名字可能不一样,要看你自己的计算的来看。如果从一开始你就按照官网的操作来的话,不用改就行了。
//the setpoint publishing rate MUST be faster than 2Hz
//发布的速率必须大于2Hz,因为px4飞行栈的两个机外(offboard)控制指令之间有500ms的时限(也就是2Hz的速率)不然的话,会回到前面的模式当中去。并且还要考虑可能的延迟。这也是我们推荐从位置控制(POSCTL)模式进入机外控制模式的原因。这样一来,如果飞机意外脱离了机外控制模式,飞机将会停在当前轨道并悬停。
ros::Rate rate(20.0);
// wait for FCU connection
//我们在发布对应消息之前,我们需要等待飞控和mavros模块的连接。在收到心跳包heartbeat message之后,代码便会跳出这个循环
while(ros::ok() && !current_state.connected){
ros::spinOnce();
rate.sleep();
}
geometry_msgs::PoseStamped pose;
pose.pose.position.x = 0;
pose.pose.position.y = 0;
pose.pose.position.z = 2;
//尽管PX4飞控在NED坐标系(导航坐标系)下操控飞机,但MAVROS是在ENU系(站心极坐标系)下进行指令传输的。 这也就是为什么我们设置z为+2
//send a few setpoints before starting
//在切换到offboard模式之前,你必须先发送一些期望点信息到飞控中。不然飞控会拒绝切换到offboard模式。在这里,100可以是随意设定的一个值。
for(int i = 100; ros::ok() && i > 0; --i){
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
mavros_msgs::SetMode offb_set_mode;
offb_set_mode.request.custom_mode = "OFFBOARD";
//我们在这里切换模式为"OFFBOARD"
mavros_msgs::CommandBool arm_cmd;
arm_cmd.request.value = true;
ros::Time last_request = ros::Time::now();
while(ros::ok()){
if( current_state.mode != "OFFBOARD" &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( set_mode_client.call(offb_set_mode) &&
offb_set_mode.response.mode_sent){
ROS_INFO("Offboard enabled");
}
last_request = ros::Time::now();
} else {
if( !current_state.armed &&
(ros::Time::now() - last_request > ros::Duration(5.0))){
if( arming_client.call(arm_cmd) &&
arm_cmd.response.success){
ROS_INFO("Vehicle armed");
}
last_request = ros::Time::now();
}
}
local_pos_pub.publish(pose);
ros::spinOnce();
rate.sleep();
}
return 0;
}
3.修改CMakeLists.txt为编译做准备
cd ..
gedit CMakeLists.txt在最后添加如下内容后保存退出
add_executable(${PROJECT_NAME}_node src/offboard_node.cpp)
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)4.开始编译
cd ~/uav_test_ws
catkin_make5.把编译成功生成的一个可执行文件移动到包目录下(offboard的目录下面)
这个生成的可执行文件的位置,可以看一下编译成功后最后输出的那几行里面有。
不然的话,你可以试一下不移动,然后继续操作下面的步骤(因为教程里面就没有给出这一步)会提示找不到找不到这个文件的位置,可是明明编译成功而且有的呀,让你发狂吧,就这个搞了我好久,气死我了!!!
6.添加环境
echo "source ~/uav_test_ws/devel/setup.bash" >> ~/.bashrc
开始仿真
1.打开一个terminal,启动飞机的gazebo仿真
cd Firmware
make px4_sitl gazebo2.打开一个terminal,运行mavros
roslaunch mavros px4.launch fcu_url:="udp://:[email protected]:14557"注意注意,这个在自己打的时候千万要注意不能多打或者少打空格、数字、点、引号,不然会报错说你的FCU URL有问题!!!
因为我错过,而且重点还是看不出来根本不知道自己到底哪里错了!!!
3.打开一个terminal,运行外部控制节点
rosrun offboard offboard_node
要是有问题的话,说找不到什么的,建议你找一找前面的内容!
成功的话:
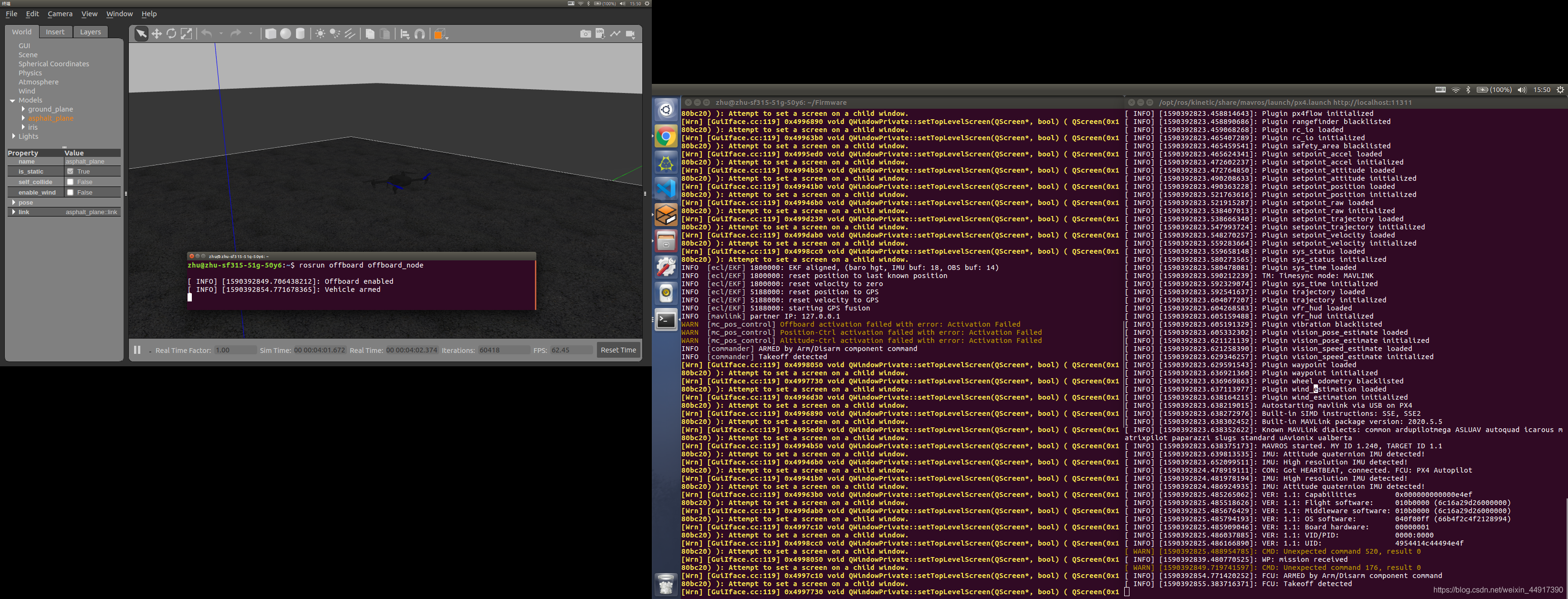
(两个屏幕看起来炒鸡爽的!!!)
三、介绍Python代码控制方法
官网有言:本示例使用 C++。 Python 中的类似示例可以在这里找到: integrationtests/python_src/px4_it/mavros。
其实我们下载的px4固件里面的Firmware里面有相同的文件
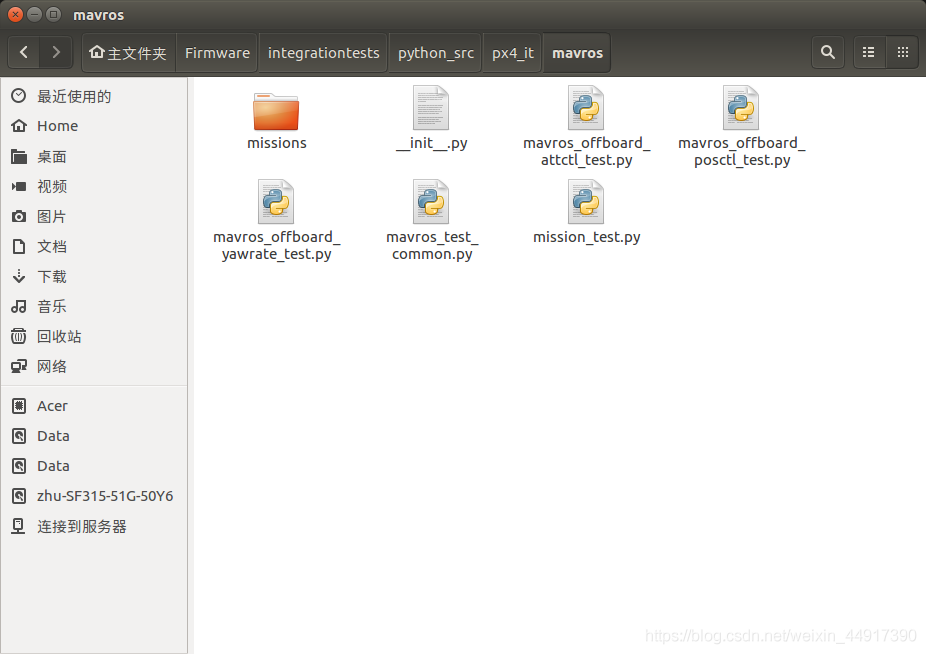
然后在offboard文件中创建一个script文件来存放Python文件,再把这里的所有的文件都拷贝进去
在运行Python之前都要注意这个Python文件是不是可执行文件,不然的话:
chmod 777 filename接着:
one:
cd Firmware
make px4_sitl gazebotwo:
roslaunch mavros px4.launch fcu_url:="udp://:[email protected]:14557"three:
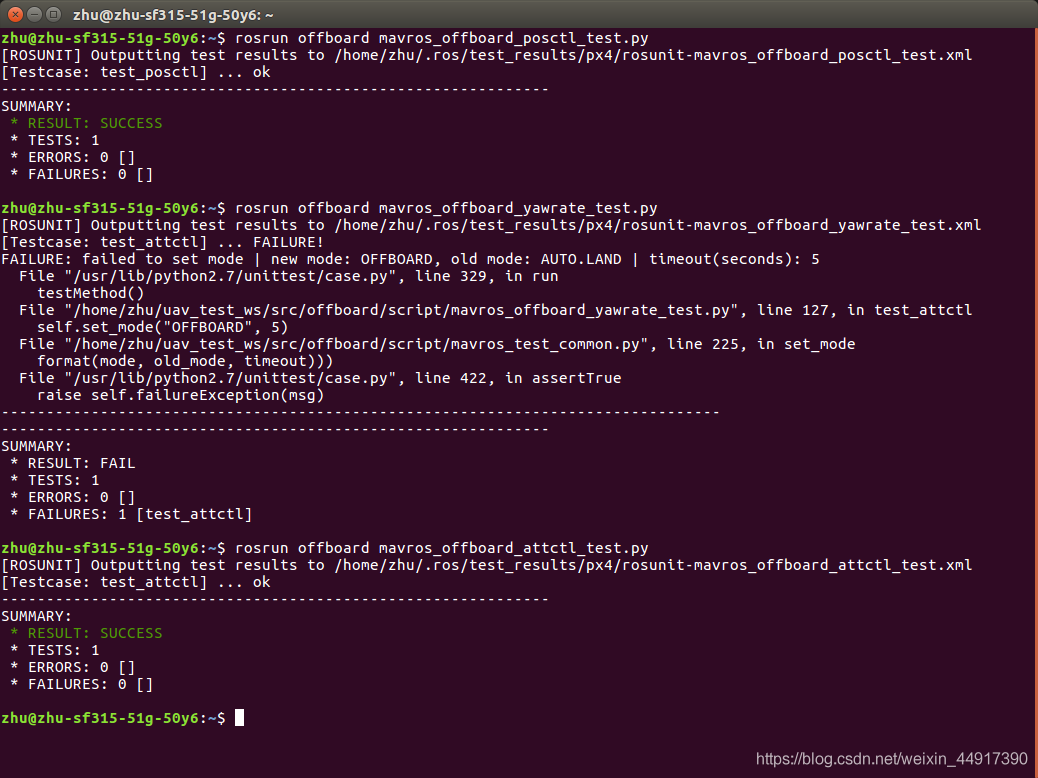
rosrun offboard mavros_offboard_attctl_test.py飞机动一下翅膀报错...
or
rosrun offboard mavros_offboard_posctl_test.py飞机绕大圈,回到原点...
or
rosrun offboard mavros_offboard_yawrate_test.py飞机一直飞向远方,不在回家...
问题一:什么东西没有装的包,报错
要什么装什么就行了,但是,其中有一个库,叫做basemap,是个钉子户(库),可能不是必须的,但是我还没装成功
问题二:有些程序可以运行,但是有些运行会报错
具体的错误以后学了应该是看得懂的吧,反正现在这个文件mavros_offboard_yawrate_test.py是不ok的,现在看那些错误还是比较懵逼的了!
大家要是有一些错误可以直接看出来的话,还麻烦我们在评论区交流学习,thanks~
智能推荐
hdu 1229 还是A+B(水)-程序员宅基地
文章浏览阅读122次。还是A+BTime Limit: 2000/1000 MS (Java/Others)Memory Limit: 65536/32768 K (Java/Others)Total Submission(s): 24568Accepted Submission(s): 11729Problem Description读入两个小于10000的正整数A和B,计算A+B。...
http客户端Feign——日志配置_feign 日志设置-程序员宅基地
文章浏览阅读419次。HEADERS:在BASIC的基础上,额外记录了请求和响应的头信息。FULL:记录所有请求和响应的明细,包括头信息、请求体、元数据。BASIC:仅记录请求的方法,URL以及响应状态码和执行时间。NONE:不记录任何日志信息,这是默认值。配置Feign日志有两种方式;方式二:java代码实现。注解中声明则代表某服务。方式一:配置文件方式。_feign 日志设置
[转载]将容器管理的持久性 Bean 用于面向服务的体系结构-程序员宅基地
文章浏览阅读155次。将容器管理的持久性 Bean 用于面向服务的体系结构本文将介绍如何使用 IBM WebSphere Process Server 对容器管理的持久性 (CMP) Bean的连接和持久性逻辑加以控制,使其可以存储在非关系数据库..._javax.ejb.objectnotfoundexception: no such entity!
基础java练习题(递归)_java 递归例题-程序员宅基地
文章浏览阅读1.5k次。基础java练习题一、递归实现跳台阶从第一级跳到第n级,有多少种跳法一次可跳一级,也可跳两级。还能跳三级import java.math.BigDecimal;import java.util.Scanner;public class Main{ public static void main(String[]args){ Scanner reader=new Scanner(System.in); while(reader.hasNext()){ _java 递归例题
面向对象程序设计(荣誉)实验一 String_对存储在string数组内的所有以字符‘a’开始并以字符‘e’结尾的单词做加密处理。-程序员宅基地
文章浏览阅读1.5k次,点赞6次,收藏6次。目录1.串应用- 计算一个串的最长的真前后缀题目描述输入输出样例输入样例输出题解2.字符串替换(string)题目描述输入输出样例输入样例输出题解3.可重叠子串 (Ver. I)题目描述输入输出样例输入样例输出题解4.字符串操作(string)题目描述输入输出样例输入样例输出题解1.串应用- 计算一个串的最长的真前后缀题目描述给定一个串,如ABCDAB,则ABCDAB的真前缀有:{ A, AB,ABC, ABCD, ABCDA }ABCDAB的真后缀有:{ B, AB,DAB, CDAB, BCDAB_对存储在string数组内的所有以字符‘a’开始并以字符‘e’结尾的单词做加密处理。
算法设计与问题求解/西安交通大学本科课程MOOC/C_算法设计与问题求解西安交通大学-程序员宅基地
文章浏览阅读68次。西安交通大学/算法设计与问题求解/树与二叉树/MOOC_算法设计与问题求解西安交通大学
随便推点
[Vue warn]: Computed property “totalPrice“ was assigned to but it has no setter._computed property "totalprice" was assigned to but-程序员宅基地
文章浏览阅读1.6k次。问题:在Vue项目中出现如下错误提示:[Vue warn]: Computed property "totalPrice" was assigned to but it has no setter. (found in <Anonymous>)代码:<input v-model="totalPrice"/>原因:v-model命令,因Vue 的双向数据绑定原理 , 会自动操作 totalPrice, 对其进行set 操作而 totalPrice 作为计..._computed property "totalprice" was assigned to but it has no setter.
basic1003-我要通过!13行搞定:也许是全网最奇葩解法_basic 1003 case 1-程序员宅基地
文章浏览阅读60次。十分暴力而简洁的解决方式:读取P和T的位置并自动生成唯一正确答案,将题给测点与之对比,不一样就给我爬!_basic 1003 case 1
服务器浏览war文件,详解将Web项目War包部署到Tomcat服务器基本步骤-程序员宅基地
文章浏览阅读422次。原标题:详解将Web项目War包部署到Tomcat服务器基本步骤详解将Web项目War包部署到Tomcat服务器基本步骤1 War包War包一般是在进行Web开发时,通常是一个网站Project下的所有源码的集合,里面包含前台HTML/CSS/JS的代码,也包含Java的代码。当开发人员在自己的开发机器上调试所有代码并通过后,为了交给测试人员测试和未来进行产品发布,都需要将开发人员的源码打包成Wa..._/opt/bosssoft/war/medical-web.war/web-inf/web.xml of module medical-web.war.
python组成三位无重复数字_python组合无重复三位数的实例-程序员宅基地
文章浏览阅读3k次,点赞3次,收藏13次。# -*- coding: utf-8 -*-# 简述:这里有四个数字,分别是:1、2、3、4#提问:能组成多少个互不相同且无重复数字的三位数?各是多少?def f(n):list=[]count=0for i in range(1,n+1):for j in range(1, n+1):for k in range(1, n+1):if i!=j and j!=k and i!=k:list.a..._python求从0到9任意组合成三位数数字不能重复并输出
ElementUl中的el-table怎样吧0和1改变为男和女_elementui table 性别-程序员宅基地
文章浏览阅读1k次,点赞3次,收藏2次。<el-table-column prop="studentSex" label="性别" :formatter="sex"></el-table-column>然后就在vue的methods中写方法就OK了methods: { sex(row,index){ if(row.studentSex == 1){ return '男'; }else{ return '女'; }..._elementui table 性别
java文件操作之移动文件到指定的目录_java中怎么将pro.txt移动到design_mode_code根目录下-程序员宅基地
文章浏览阅读1.1k次。java文件操作之移动文件到指定的目录_java中怎么将pro.txt移动到design_mode_code根目录下