Livox LiDAR点云数据类型的转化——livox_ros_driver/CustomMsg到sensor_msgs/PointCloud2-程序员宅基地
在做Lidar与IMU数据之间的标定时,出现了数据无法读取的问题
主要是代码里读取lidar数据是需要下面的语句
// add lidar msg
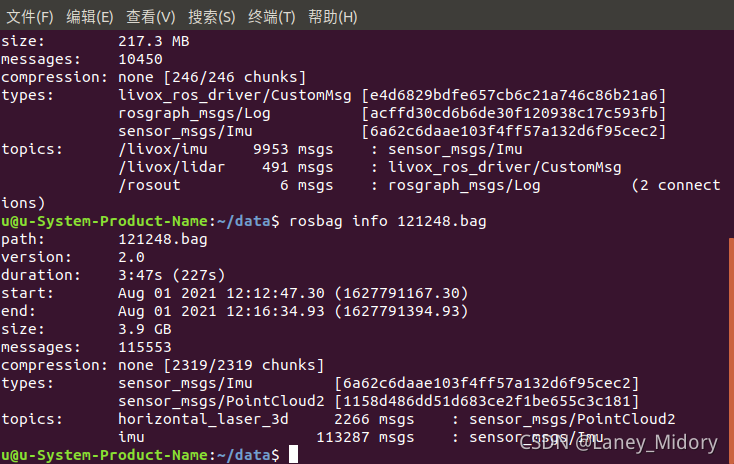
sensor_msgs::PointCloud2ConstPtr lidar_msg = m.instantiate<sensor_msgs::PointCloud2>();查看bag文件的数据类型
rosbag info XXX.bag可以明显看出,用的是自带的sensor_msgs/PointCloud2类型的读取函数,因此这里需要对数据格式进行一个转换
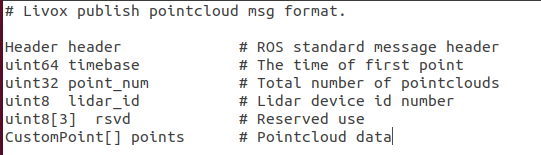
 如图可以看出两种数据类型的区别
如图可以看出两种数据类型的区别
进行转换需要首先分析这两种数据类型的存储格式
livox存储格式看这
Livox defined msg format is :
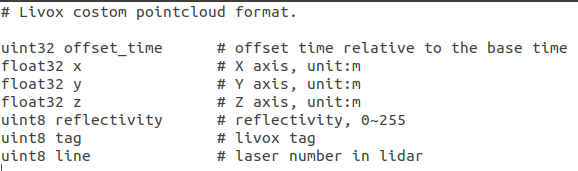
CustomPoint format:
代码部分:
点云部分
for (int i = 0; i < point_num; i++)
{
cloud.points[i].x = msg.points.at(i).x;
cloud.points[i].y = msg.points.at(i).y;
cloud.points[i].z = msg.points.at(i).z;
cloud.points[i].intensity = msg.points.at(i).reflectivity;
}其他信息:
ros_msg.header.stamp = msg.header.stamp;
ros_msg.header.frame_id = "rslidar";
ros_msg.header.seq = 0;
ros_msg.height = 1;
ros_msg.width = cloud.width;
ros_msg.point_step = sizeof(pcl::PointXYZI);
ros_msg.row_step =
static_cast<uint32_t>(sizeof(pcl::PointXYZI) * ros_msg.width);
ros_msg.is_dense = false;
livoxbag.write("/horizontal_laser_3d", ros_msg.header.stamp, ros_msg);main函数:
int main(int argc, char* argv[])
{
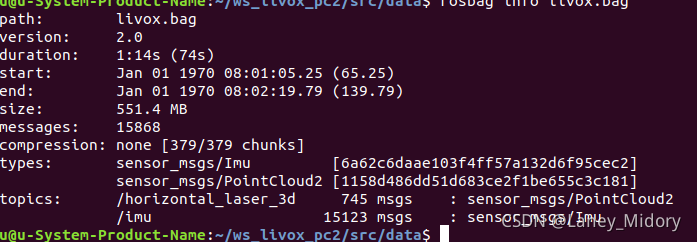
std::string bag_path = "/home/u/ws_livox_pc2/src/data/livox.bag";
livoxbag.open(bag_path, rosbag::bagmode::Write);
ros::init(argc, argv, "livox2pointcloud2");
ros::NodeHandle nh;
ros::Subscriber imu_sub = nh.subscribe("/livox/imu", 100, &imuCallback);
ros::Subscriber livox_sub = nh.subscribe("/livox/lidar", 100, &laserCallback);
ros::spin();
return 0;
}这段代码这里是输入一个新的包进行数据写入
然后打开一个新终端
roscore
输入
./XXX
再打开一个新的终端
rosbag play XXX.bag
就可以实现类型的转换啦
智能推荐
王斌老师的博客_王斌 github-程序员宅基地
文章浏览阅读480次。http://blog.sina.com.cn/s/blog_736d0b9101018cgc.html_王斌 github
ACM OJ Collection_htt//acm.wydtang.top/-程序员宅基地
文章浏览阅读737次。原文来自:http://blog.csdn.net/hncqp/article/details/4455263 ACM OJ Collection(排名不分先后):中国:浙江大学(ZJU):http://acm.zju.edu.cn/北京大学(PKU):htt_htt//acm.wydtang.top/
ios 自己服务器 苹果支付_修复苹果IOS支付-程序员宅基地
文章浏览阅读467次。更新记录1.0.0(2019-07-01)插件简介专门用来修复苹果IOS支付时出现"您已购买此App内购买项目。此项目将免费恢复"。问题描述首先在IOS平台里面创建“APP内购买项目”,选择的是“消耗型项目”,然后用uni-app官方的支付api进行支付,多支付几次,有时候就会出现提示“您已购买此App内购买项目。此项目将免费恢复”,特别是在沙盒测试里面支付很大几率出现,我明明选的是消耗型项目,应..._ios开发苹果支付恢复权益
spring MVC mock类单元测试(controller)_mvcmock-程序员宅基地
文章浏览阅读5.6k次。Spring从J2EE的Web端为每个关键接口提供了一个mock实现:MockHttpServletRequest几乎每个单元测试中都要使用这个类,它是J2EE Web应用程序最常用的接口HttpServletRequest的mock实现。MockHttpServletResponse此对象用于HttpServletRespons_mvcmock
【我的世界Minecraft-MC】常见及各种指令大杂烩【2022.8版】_summon生成掉落物-程序员宅基地
文章浏览阅读8.5k次,点赞7次,收藏22次。execute as @a at @s run clear @s minecraft:dark_oak_planks{display:{Name:“{“text”:“第三关[阴森古堡]”,“color”:“red”,“italic”:false}”,color:“16711680”},Enchantments:[{id:“protection”,lvl:1}],Unbreakable:1b} 1。Lore:[“{“text”:“免费”,“color”:“blue”,“italic”:false}”]..._summon生成掉落物
CentOS 7安装教程(图文详解)_centos 安装-程序员宅基地
文章浏览阅读10w+次,点赞487次,收藏2.1k次。CentOS 7安装教程: 准备: 软件:VMware Workstation 镜像文件:CentOS-7-x86_64-bin-DVD1.iso (附:教程较为详细,注释较多,故将操作的选项进行了加粗字体显示。) 1、文件--新建虚拟机--自定义 2、..._centos 安装
随便推点
Github项目分享——免费的画图工具drow,前端插件化面试_draw github画图-程序员宅基地
文章浏览阅读333次,点赞3次,收藏3次。项目介绍一款很好用的免费画图软件,支持ER图、时序图、流程图等等在项目的releases就可以下载最新版本同时支持在线编辑。_draw github画图
如何开始学习人工智能?入门的学习路径和资源是什么?_人工智能学习路径-程序员宅基地
文章浏览阅读930次。嗨,大家好!如果你对人工智能充满了好奇,并且想要入门这个领域,那么你来对地方了。本文将向你介绍如何从零基础开始学习人工智能,并逐步掌握核心概念和技能。无论你是大学生、职场新人还是对人工智能感兴趣的任何人,都可以按照以下学习路径逐步提升自己。_人工智能学习路径
Unity3D 导入资源_unity怎么导入压缩包-程序员宅基地
文章浏览阅读4.3k次,点赞2次,收藏8次。打开Unity3D的:window-asset store就会出来这样的界面:我们选择一个天空纹理,注意这里的标签只有一个,如果有多个就会显示所有标签的内容:找个比较小的免费的下载一下试试,比如这个:下载以后:点击import就会出现该窗口:然后再点击最底下的import:就导入到我们这里来了。从上面可以切换场景:..._unity怎么导入压缩包
jqgrid 服务器端验证,javascript – jqgrid服务器端错误消息/验证处理-程序员宅基地
文章浏览阅读254次。在你以前的问题的the answer的最后一部分,我试着给出你当前的问题的答案.也许我表示不够清楚.您不应该将错误信息放在标准成功响应中.您应该遵循用于服务器和客户端之间通信的HTTP协议的主要规则.根据HTTP协议实现网格中的加载数据,编辑行和与服务器的所有Ajax通信.每个HTTP响应都有响应第一行的状态代码.了解这个意义非常重要.典型的JSON数据成功请求如下HTTP/1.1 200 OK...._decode message error
白山头讲PV: 用calibre进行layout之间的比对-程序员宅基地
文章浏览阅读4k次,点赞8次,收藏29次。我们在流片之后,通常还是有机会对layout进行局部小的修改。例如metal change eco或者一些层次的局部修改。当我们修改之后,需要进行与之前gds的对比,以便确认没有因为某些..._calibre dbdiff
java exit方法_Java:如何测试调用System.exit()的方法?-程序员宅基地
文章浏览阅读694次。问题我有一些方法应该在某些输入上调用567779278。不幸的是,测试这些情况会导致JUnit终止!将方法调用放在新线程中似乎没有帮助,因为System.exit()终止了JVM,而不仅仅是当前线程。是否有任何常见的处理方式?例如,我可以将存根替换为System.exit()吗?[编辑]有问题的类实际上是一个命令行工具,我试图在JUnit中测试。也许JUnit根本不适合这份工作?建议使用互补回归测..._检查system.exit