Ubuntu18.04+ROS Realsense的安装与使用-程序员宅基地
文章目录
- 前言
- 一、安装软件包与librealsense
-
- 1、内核检查
- 2、Installing the packages:
-
- 2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
- 可以用aptitude来解决这个依赖问题
- 二、ROS
- 总结
前言
本来觉得realsense的使用是挺简单的一回事(事实证明确实简单…),但想着之后自己可能还会多次进行配置,还是记录一下,方便以后查阅
一、安装软件包与librealsense
完全可以照着官方linux安装教程进行安装。以下几乎仅为翻译:(在安装时应断开realsense的连接)
1、内核检查
realsense DKMS kernel drivers package(就是后面需要安装的librealsense2-dkms),支持的Ubuntu LTS内核版本有:4.4, 4.8, 4.10, 4.13, 4.15, 4.18*, 5.0*, 5.3* and 5.4。可以通过 uname -r查看自己电脑内核版本,如我的为5.4.0-67-generic。
2、Installing the packages:
- 注册服务器公开密匙:(如果失败可以尝试终端使用代理再尝试)
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
- 将服务器加入仓库列表
Ubuntu 16 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo xenial main" -u
Ubuntu 18 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo bionic main" -u
Ubuntu 20 LTS:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo focal main" -u
- 库安装
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
上面两行将部署librealsense2 udev规则,构建和激活内核模块,运行时库以及可执行的演示和工具。
2022.11.21更新:在换了ubuntu20.04(带有)5.15的内核报错后,降级到5.3重新安装依然报错(最后解决)① 首先是sudo apt-get install librealsense2-dkms报错E: Sub-process /usr/bin/dpkg returned an error code (1),这个直接谷歌就能搜到一堆解决方案;然后sudo apt-get install librealsense2-utils报错 librealsense2-utils : 依赖: libgtk-3-dev 但是它将不会被安装,直接安装libgtk-3-dev依旧报错libgtk-3-dev : 依赖: gir1.2-gtk-3.0 (= 3.24.18-1ubuntu1) 但是 3.24.20-0ubuntu1.1 正要被安装,这里直接递归装错误的包,比如这里说需要gir1.2-gtk-3.0=3.24.18-1ubuntu1,那就sudo apt install gir1.2-gtk-3.0=3.24.18-1ubuntu1,然后再装libgtk-3-dev,再报其他错,再解决。。。最终装上了。
可以用aptitude来解决这个依赖问题
-
验证:连接realsense,终端输入realsense-viewer即可;也可再验证,终端输入modinfo uvcvideo | grep “version:”,返回的命令中应该包含“realsense”。
-
包升级与卸载
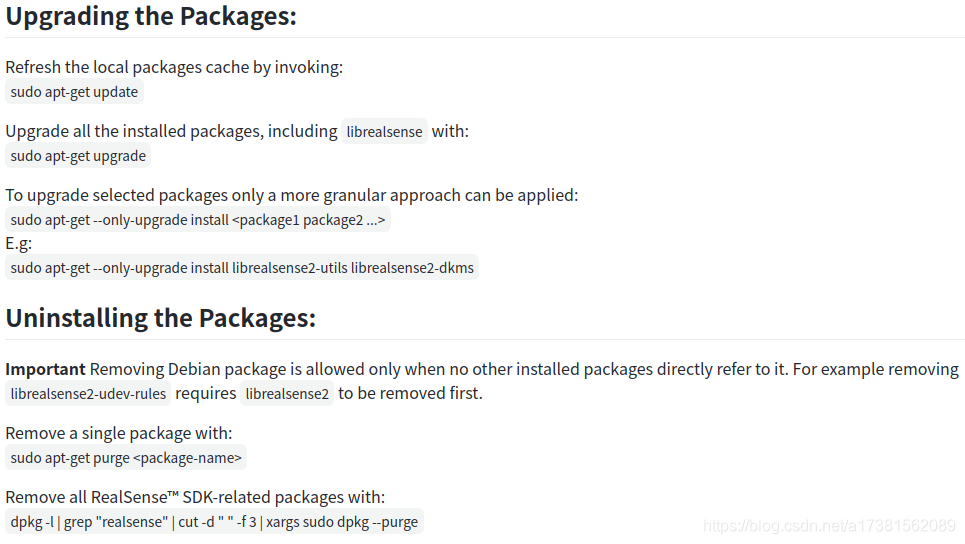
-
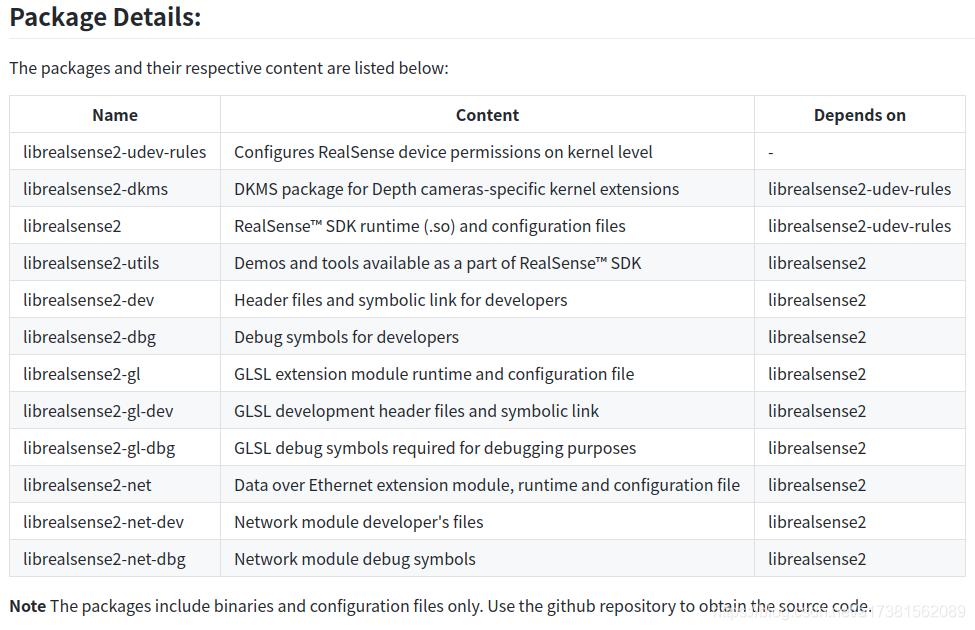
包细节
二、ROS
这一部分也有官网的参考安装,也是照着做就可以
1、包安装
采用的是官网的Method1方式,这种方式的坏处是安装的包会在/opt/ros/melodic/share/realsense2_camera路径下,并非自己的catkin_ws。使用Method2的方式可以git到自定义工作空间。推荐Method2
Method1
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-melodic-realsense2-description
Method2
首先安装之前可选安装的库,再git realsense2-ros到catkin_ws的src中,无脑catkin_make就ok。
sudo apt-get install librealsense2-dev
2、使用
- 获取/camera/depth/color/points
通过以下指令就将所有相机的所有相关信息通过ros topic的方式发布出去了
roslaunch realsense2_camera rs_camera.launch
也可通过下面命令直接查看点云信息
roslaunch realsense2_camera demo_pointcloud.launch
roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
-
获取/camera/depth_registered/points
这里还需要ros的一个驱动包:git clone https://github.com/ros-drivers/rgbd_launch.git之后将rs_rgbd.launch和rs_camera.launch文件中的arg name=“enable_pointcloud” default="true"由false改为true(这一步可以获得/camera/depth/color/points),运行:
roslaunch realsense2_camera rs_rgbd.launch
这里还不太清楚这两个topic之间的差别,前者也是registered后得到的点吗?希望有大佬能够解答,也先挖个坑,以后再填。
补:
自己琢磨了半天,大致想清楚camera/depth/color/points和camera/depth_registered/points之间的区别了——:
- 首先前者camera/depth/color/points的获取方式为,利用针孔成像模型和相机的内参(焦距、光心距等),逐深度图得到点云,再按同样的方式逐彩色图将RGB信息赋予点云。参考https://blog.csdn.net/qq_43176116/article/details/93878513,里面的程序很好的说明了这一点

- 后者camera/depth_registered/points首先要做的工作就是将3D相机产生的深度图像(depth image)配准(registration),以生成配准深度图像(registed depth image)。实际上配准的目的就是想让深度图和彩色图重合在一起,即是将深度图像的图像坐标系转换到彩色图像的图像坐标系下。配准前后的对比:

参考:
https://blog.csdn.net/aichipmunk/article/details/9264703
https://www.cnblogs.com/cv-pr/p/5769617.html
如果有理解的不对的地方还望各位大佬指证,有更好的证明例子也欢迎告诉我,谢谢大噶~
还有很多参数设置(特别是filters)还需要熟悉,目前就不再深究了,能得到点云信息就Ok了
总结
还以为有多难呢,就这?
智能推荐
基于STM32F103的增量式PI算法_通过pi控制算法得到的增量怎么转化为pwm的频率-程序员宅基地
文章浏览阅读2.7k次。增量式PI的程序百度一搜由算法可以看出,主要是误差参与运算,控制量可以理解为误差的累计和消除过程,比如第一次调节有误差1,第二次调节有误差2,误差2的出现说明第一次调节没有调整到给定值,控制量在第二次会改变,这样继续调节下去,调整到给定值时候,理论上是0了。比例积分系数和控制量的关系比例可认为是快速到达给定值积分可认为是消除稳态误差一般的系统,PI就够用了基本思路1初始化给定值,或是外部给予2实时采样被控对象3采样值与外部给予比较,并进行算法处理,得到控制量4由控_通过pi控制算法得到的增量怎么转化为pwm的频率
Ansible自动化运维工具主机清单配置
Ansible 提供了多种方式来定义和管理主机列表,除了默认的文件之外,您还可以使用自定义主机列表。这提供了更大的灵活性,允许您根据需要从不同来源获取主机信息。
堆栈的实现(C语言)_c语言堆栈-程序员宅基地
文章浏览阅读1.8k次,点赞6次,收藏36次。堆栈(stack)的基本概念堆栈是一种特殊的线性表,堆栈的数据元素及数据元素之间的逻辑关系和线性表完全相同,其差别是:线性表允许在任意位置插入和删除数据元素操作,而堆栈只允许在固定一端进行插入和删除数据元素操作。 堆栈中允许进行插入和删除数据元素操作的一端称为栈顶,另一端称为栈底。栈顶的当前位置是动态的,用于标记栈顶当前位置的变量称为栈顶指示器(或栈顶指针)。 堆栈的插入操作通常称为进栈或入栈,每次进栈的数据元素都放在原当前栈顶元素之前而成为新的栈顶元素。堆栈的删除操作通常称为出栈或退栈,每次出栈的_c语言堆栈
如何过滤敏感词免费文本敏感词检测接口API_违规关键词过滤api-程序员宅基地
文章浏览阅读1.6k次。敏感词过滤是随着互联网社区发展一起发展起来的一种阻止网络犯罪和网络暴力的技术手段,通过对可能存在犯罪或网络暴力可能的关键词进行有针对性的筛查和屏蔽,很多时候我们能够防患于未然,把后果严重的犯罪行为扼杀于萌芽之中。_违规关键词过滤api
ns3测吞吐量_ns3计算吞吐量-程序员宅基地
文章浏览阅读9.1k次,点赞2次,收藏42次。———————10月14日更—————————- 发现在goal-topo.cc中,由于Node#14被放在初始位置为0的地方,然后它会收到来自AP1和AP2的STA的OLSR消息(距离他们太近了吧)。 然而与goal-topo-trad.cc不同,goal-topo-trad.cc中Node#14可以在很远就跟自己的AP3通信,吞吐量比较稳定。而goal-topo.cc在开始的很长时间内并_ns3计算吞吐量
sqlite3中绑定bind函数用法 (将变量插入到字段中)_sqlite3_bind_double-程序员宅基地
文章浏览阅读7k次,点赞2次,收藏4次。转载至:https://blog.csdn.net/xiaoaid01/article/details/17892579 参数绑定:和大多数关系型数据库一样,SQLite的SQL文本也支持变量绑定,以便减少SQL语句被动态解析的次数,从而提高数据查询和数据操作的效率。要完成该操作,我们需要使用SQLite提供的另外两个接口APIs,sqlite3_reset和sqlite3..._sqlite3_bind_double
随便推点
ARFoundation系列讲解 - 39 AR看车六_arfoundation 关闭动画位移计算-程序员宅基地
文章浏览阅读1k次。十二、播放模型动画1.这里我们要做的是第一次点击中心按钮播放打开车门动画,第二次点击中心按钮关闭车门动画。2.新建一个脚本,命名为“AnimationManager.cs”。(代码如下)using System.Collections.Generic;using UnityEngine;/// <summary>动画管理</summary>public class AnimationManager : MonoBehaviour{ /// <s._arfoundation 关闭动画位移计算
Idea 运行spring项目 出现的bug_idea spring代理对象出bug-程序员宅基地
文章浏览阅读220次。Idea 运行spring项目 出现的bugbug 1错误信息:Cannot start compilation: the output path is not specified for module “02_primary”.Specify the output path in the Project Structure dialog.解决办法:..._idea spring代理对象出bug
JavaFx基础学习【四】:UI控件的通用属性_javafx教程-ui控件-程序员宅基地
文章浏览阅读1k次,点赞2次,收藏6次。Node,就是节点,在整体结构中,就是黄色那一块,红色也算个人理解,在实际中,Node可以说是我们的UI页面上的每一个节点了,比如按钮、标签之类的控件,而这些控件,大多都是有一些通用属性的,以下简单介绍一下。_javafx教程-ui控件
【嵌入式Linux】03-Ubuntu-文件系统结构_嵌入式linux使用ubuntu文件系统-程序员宅基地
文章浏览阅读136次。此笔记由个人整理塞上苍鹰_fly课程来自:正点原子_手把手教你学Linux一、文件系统结构g根目录:Linux下“/”就是根目录!所有的目录都是由根目录衍生出来的。/bin存放二进制可执行文件,这些命令在单用户模式下也能够使用。可以被root和一般的账号使用。/bootUbuntu内核和启动文件,比如vmlinuz-xxx。gurb引导装载程序。/dev设备驱动文件/etc存放一些系统配置文件,比如用户账号和密码文件,各种服务的起始地址。._嵌入式linux使用ubuntu文件系统
Win10黑屏卡死原因分析--罕见的内核pushlock死锁问题-程序员宅基地
文章浏览阅读2.1k次。此问题已向微软公司反馈,仅供学习参考这是微软内核的一个Bug.发生在内核函数 MmEnumerateAddressSpaceAndReferenceImages 和 MiCreateEnclave之间,如果时机不当会造成这两个函数之间死锁,而且还是一个pushlock死锁问题,十分罕见,这也是导致系统开机黑屏,系统突然卡死的元凶之一。Win10被骂了很久了,这次真的被我遇上了,系统无缘无故卡死_win10黑屏卡死原因分析--罕见的内核pushlock死锁问题
ie不支持java_巧用批处理解决IE不支持javascript等问题(转)-程序员宅基地
文章浏览阅读112次。巧用批处理解决IE不支持javascript等问题rem=====批处理开始========regsvr32actxprxy.dllregsvr32shdocvw.dllRegsvr32URLMON.DLLRegsvr32actxprxy.dllRegsvr32shdocvw.dllregsvr32oleaut32.dllrundll32.exeadvpack.dll/DelNo..._ie不支持javasript批处理