OpenMV(五)--STM32实现人脸识别_stm32人脸识别-程序员宅基地
技术标签: •OpenMV stm32 •嵌入式AI 嵌入式硬件 单片机
STM32实现人脸识别
引
OpenMV(一)–基础介绍与硬件架构
OpenMV(二)–IDE安装与固件下载
OpenMV(三)–实时获取摄像头图片
OpenMV(四)–STM32实现特征检测
前言
本专栏基于以STM32H743为MCU的OpenMV-H7基板,结合OV7725卷帘快门摄像头进行相关机器视觉应用的开发。人脸识别的前提是人脸检测,本篇博文基于OpenMV官方的Face-Detection例程,来解析一下怎么实现人脸识别。
1. 人脸检测
人脸检测就是通过摄像头实时获取的图片,来标记出人脸的位置。本节代码的目的就是将摄像头拍摄的画面中的人脸用矩形框表示出来。人脸检测的本质是特征识别,OpenMV中已经集成了非常多的特征库和算法库,比如image模块下的find_features()特征寻找函数。
1.1 构造函数
- image.find_features(cascade, threshold=0.5, scale=1.5, roi)
搜索和Haar Cascade匹配的所有区域的图像,并返回一个关于这些特征的边界框矩形元祖(x, ,y, w, h)的列表,若没有发现任何特征,则返回一个空白列表。基于Haar特征的cascade分类器一种有效的物品检测(object detect)方法。它是一种机器学习方法,通过许多正负样例中训练得到cascade方程,然后将其应用于其他图片。详细内容可以参考博客:使用Haar Cascade 进行人脸识别- cascade:Haar Cascade 对象
- threshold: 是浮点数(0.0-1.0),其中较小的值在提高检测速率同时增加误报率。相反,较高的值会降低检测速率,同时降低误报率。
- scale: 是一个必须大于1.0的浮点数。较高的比例因子运行更快,但是其图像匹配相应较差。理想值介于1.35到1.5之间。
- roi:指定识别区域的矩形元组(x, y, w, h)。如果没有指定,roi即整个图像的图像矩形。
1.2 源码分析
"""
人脸检测例程
利用Haar Cascade特征检测器来实现:一个Haar Cascade是一系列简单区域的对比检查,人脸识别有25个阶段,每个阶段有几百次检测。Haar Cascade运行很快是因为它是逐个阶段进行检测的。
OpenMV使用一种称为积分图像的数据结构来在恒定时间内快速执行每个区域的对比度检查
"""
# 导入相应的库
import sensor, image, time
# 初始化摄像头
sensor.reset()
# 设置相机图像的对比度为1
sensor.set_contrast(1)
# 设置相机的增益上限为16
sensor.set_gainceiling(16)
# 设置采集到照片的大小
sensor.set_framesize(sensor.HQVGA)
# 设置采集到照片的格式:灰色图像
sensor.set_pixformat(sensor.GRAYSCALE)
# 加载Haar Cascade 模型
# 默认使用25个步骤,减少步骤会加快速度但会影响识别成功率
face_cascade = image.HaarCascade("frontalface", stage = 25)
print(face_cascade)
# 创建一个时钟来计算摄像头每秒采集的帧数FPS
clock = time.clock()
while(True):
# 更新FPS时钟
clock.tick()
# 拍摄图片并返回img
img = sensor.snapshot()
# 寻找人脸对象
# threshold和scale_factor两个参数控制着识别的速度和准确性
objects = img.find_features(face_cascade, threshold=0.75, scale_factor=1.25)
# 用矩形将人脸画出来
for r in objects:
img.draw_rectangle(r)
# 串口打印FPS参数
print(clock.fps())
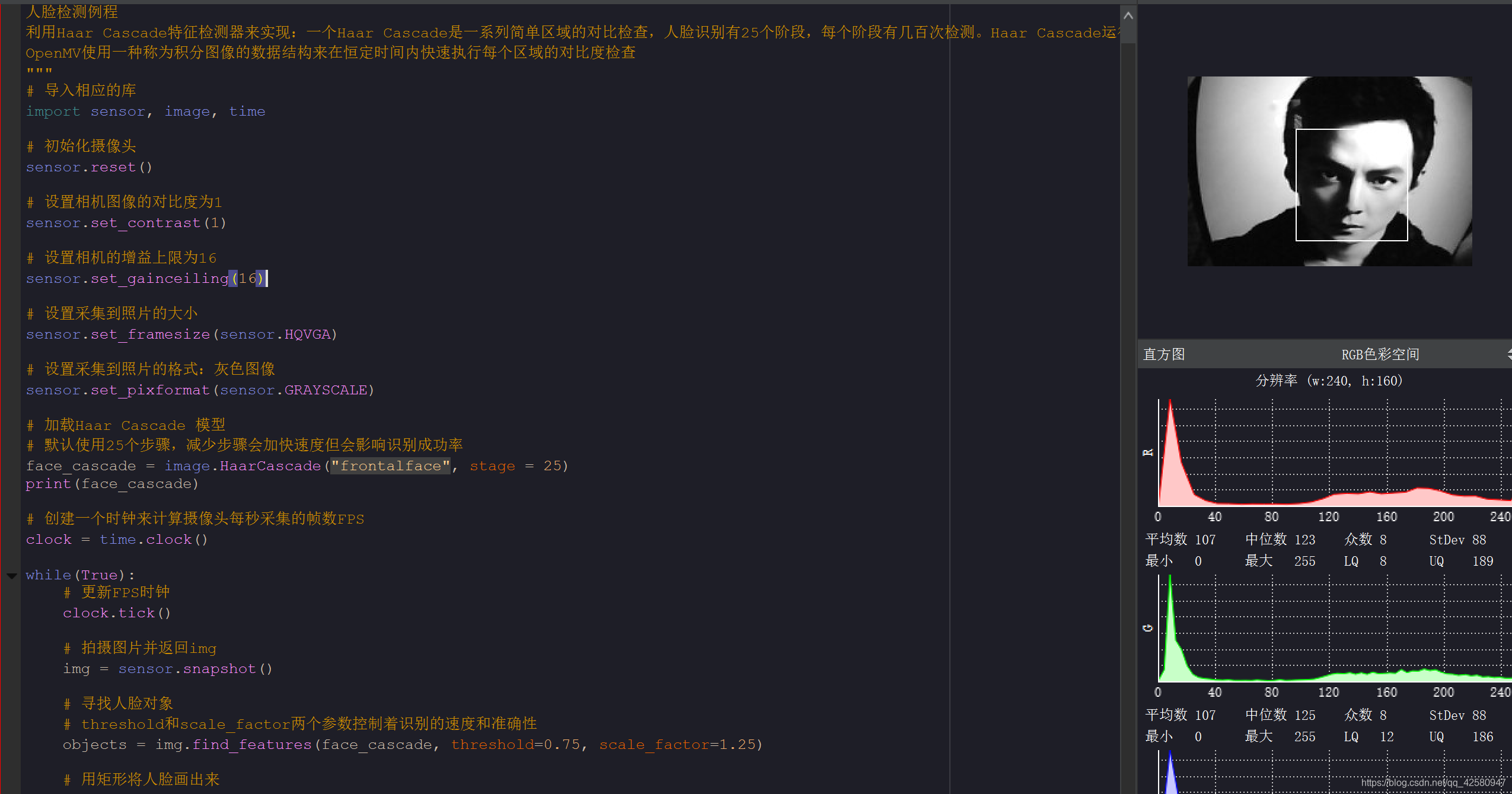
我们将板子连接到OpenMV IDE, 新建文件,并将上述代码copy进去,点击左下角的绿色按钮,我们就可以看到IDE右边的窗口在实时显示提取到的人脸特征图片:
2. 人脸识别
人脸识别是通过短时间的人脸特征学习,再重新识别的过程,这节内容是基于第一小节的人脸检测的基础上完成的。
2.1 构造函数
本节是人脸检测和特征点识别的结合,实验用到的函数和对象在之前都有介绍过,分别是
- image.find_features(cascade, threshold=0.5, scale=1.5, roi)
收获和Haar Cascade 匹配的所有区域的对象,并返回关于这个特征的边界框矩形元组 - image.find_keypoints(roi, threshold=20, normalize=False, scale_factor=1.5, max_keypoints=100, corner_detector=image.CORNER_AGAST)
特征点识别函数,返回一个image.rect矩形对象列表 - image.match_descriptor(descriptor0, descriptor1, threshold=70, filter_outliers=False)
特征点对比函数。
2.2 源码分析
对于人脸识别,具体的实现步骤如下:
初始化和配置相应模块–>加载人脸检测Haar Cascade模型–>对当前的人脸学习并记录特征点K1–>在采集的图像中提取特征点K2–>对比K1和K2是否一致–>如果一致就在图中用矩形画出相应位置
"""
人脸识别例程
第一步先使用Haar Cascade找出人脸并记录该关键点
第二步就是不停的检测当前获取图片的关键点是否匹配
"""
# 导入相应的库
import sensor, image, time
# 初始化摄像头
sensor.reset()
# 设置相机图像的对比度为3
sensor.set_contrast(3)
# 设置相机的增益上限为16
sensor.set_gainceiling(16)
# 设置采集到照片的大小
sensor.set_framesize(sensor.VGA)
# 在VGA(640*480)下开个小窗口,相当于数码缩放
sensor.set_windowing((320, 240))
# 设置采集到照片的格式:灰色图像
sensor.set_pixformat(sensor.GRAYSCALE)
# 加载Haar Cascade 模型
# 默认使用25个步骤,减少步骤会加快速度但会影响识别成功率
face_cascade = image.HaarCascade("frontalface", stage = 25)
print(face_cascade)
# 初始化特征kpts1
kpts1 = None
# 找到人脸
while(kpts1 == None):
# 拍摄图片并返回img
img = sensor.snapshot()
img.draw_string(0, 0, "Looking for a face...")
# 寻找人脸对象
# threshold和scale_factor两个参数控制着识别的速度和准确性
objects = img.find_features(face_cascade, threshold=0.5, scale_factor=1.25)
if objects:
# 将 ROI(x, y, w, h)往各个方向扩展31像素
face = (objects[0][0]-31,
objects[0][1]-31,
objects[0][2]+31*2,
objects[0][3]+31*2)
# 使用扩展后的ROI区域(人脸)学习关键点
kpts1 = img.find_keypoints(threshold = 10,
scale_factor = 1.1,
max_keypoints = 100,
roi = face)
img.draw_keypoints(kpts1, size=24)
img = sensor.snapshot()
time.sleep(2000)
while(True):
img = sensor.snapshot()
# 从图像中提取关键点
kpts2 = img.find_keypoints(threshold = 10,
scale_factor = 1.1,
max_keypoints = 100,
normalized = True)
if(kpts2):
# 跟kpts1匹配
c = image.match_descriptor(kpts1, kpts2, threshold = 85)
# c[6]为match值,值越大表示匹配程度越高
match = c[6]
if(match > 5):
img.draw_rectangle(c[2:6])
img.draw_cross(c[0], c[1], size = 10)
我们将板子连接到OpenMV IDE, 新建文件,并将上述代码copy进去,点击左下角的绿色按钮,我们就可以看到IDE右边的窗口在首先学习了人脸特征:

然后我们换一张还是吴彦祖的人脸看看是否能够进行识别:

从图中可以发现,已经成功识别了这张人脸特征。
3.通过本地特征文件进行人脸识别
第2节的例程是在线学习特征然后进行人脸识别,但是绝大多数的应用场景需要我们对比本地的人脸特征库和目标图像。我们要做的步骤有两部,首先要将人脸特征保存到本地,其次是调用本地的特征来进行人脸识别,下面我们将通过实例来分析如果实现这两个步骤。
3.1 将人脸特征保存到本地
将人脸特征保存到本地只需要一句语句即可:
image.save_descriptor(kpts, "path")
其中kpts为要保存的特征点,path为保存路径。
源码如下:
"""
保存人脸特征例程
第一步先使用Haar Cascade识别出人脸,并获取人脸的特征
第二步就是将特征保存在本地文件中
"""
# 导入相应的库
import sensor, image, time
# 初始化摄像头
sensor.reset()
# 设置相机图像的对比度为3
sensor.set_contrast(3)
# 设置相机的增益上限为16
sensor.set_gainceiling(16)
# 设置采集到照片的大小
sensor.set_framesize(sensor.VGA)
# 在VGA(640*480)下开个小窗口,相当于数码缩放
sensor.set_windowing((320, 240))
# 设置采集到照片的格式:灰色图像
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.skip_frames(time = 3000) # Wait for settings take effect.
# 加载Haar Cascade 模型
# 默认使用25个步骤,减少步骤会加快速度但会影响识别成功率
face_cascade = image.HaarCascade("frontalface", stage = 25)
# 初始化特征kpts1
kpts1 = None
# 文件名
FILE_NAME = "kpts1"
# 找到人脸
while(kpts1 == None):
# 拍摄图片并返回img
img = sensor.snapshot()
img.draw_string(0, 0, "Looking for a face...")
# 寻找人脸对象
# threshold和scale_factor两个参数控制着识别的速度和准确性
objects = img.find_features(face_cascade, threshold=0.5, scale_factor=1.25)
if objects:
# 将 ROI(x, y, w, h)往各个方向扩展31像素
face = (objects[0][0]-31,
objects[0][1]-31,
objects[0][2]+31*2,
objects[0][3]+31*2)
# 使用扩展后的ROI区域(人脸)学习关键点
kpts1 = img.find_keypoints(threshold = 10,
scale_factor = 1.1,
max_keypoints = 100,
roi = face)
img.draw_keypoints(kpts1, size=24)
img = sensor.snapshot()
#将人脸保存打本地文件
image.save_descriptor(kpts1, "/face_feature/%s.orb"%(FILE_NAME))
3.2 通过本地特征文件进行人脸识别
提取本地特征文件只需要一句语句即可:
kpts1 = image.load_descriptor("path")
其中kpts1为要本地文件中的特征,path为保存路径。
源码如下:
"""
加载本地特征文件进行人脸识别例程
第一步先从本地加载特征文件
第二步就是不停的检测当前获取图片的关键点判断是否和本地特征匹配
"""
# 导入相应的库
import sensor, image, time
# 初始化摄像头
sensor.reset()
# 设置相机图像的对比度为3
sensor.set_contrast(3)
# 设置相机的增益上限为16
sensor.set_gainceiling(16)
# 设置采集到照片的大小
sensor.set_framesize(sensor.VGA)
# 在VGA(640*480)下开个小窗口,相当于数码缩放
sensor.set_windowing((320, 240))
# 设置采集到照片的格式:灰色图像
sensor.set_pixformat(sensor.GRAYSCALE)
sensor.skip_frames(time = 10000) # Wait for settings take effect.
# 加载Haar Cascade 模型
# 默认使用25个步骤,减少步骤会加快速度但会影响识别成功率
face_cascade = image.HaarCascade("frontalface", stage = 25)
print(face_cascade)
# 从本地提取特征
kpts1 = image.load_descriptor("/face_feature/kpts1.orb")
while(True):
img = sensor.snapshot()
# 从图像中提取关键点
kpts2 = img.find_keypoints(threshold = 10,
scale_factor = 1.1,
max_keypoints = 100,
normalized = True)
if(kpts2):
# 跟kpts1匹配
c = image.match_descriptor(kpts1, kpts2, threshold = 85)
# c[6]为match值,值越大表示匹配程度越高
match = c[6]
if(match > 10):
img.draw_rectangle(c[2:6])
img.draw_cross(c[0], c[1], color = (255,0,0), size = 10)
智能推荐
5个超厉害的资源搜索网站,每一款都可以让你的资源满满!_最全资源搜索引擎-程序员宅基地
文章浏览阅读1.6w次,点赞8次,收藏41次。生活中我们无时不刻不都要在网站搜索资源,但就是缺少一个趁手的资源搜索网站,如果有一个比较好的资源搜索网站可以帮助我们节省一大半时间!今天小编在这里为大家分享5款超厉害的资源搜索网站,每一款都可以让你的资源丰富精彩!网盘传奇一款最有效的网盘资源搜索网站你还在为找网站里面的资源而烦恼找不到什么合适的工具而烦恼吗?这款网站传奇网站汇聚了4853w个资源,并且它每一天都会持续更新资源;..._最全资源搜索引擎
Book类的设计(Java)_6-1 book类的设计java-程序员宅基地
文章浏览阅读4.5k次,点赞5次,收藏18次。阅读测试程序,设计一个Book类。函数接口定义:class Book{}该类有 四个私有属性 分别是 书籍名称、 价格、 作者、 出版年份,以及相应的set 与get方法;该类有一个含有四个参数的构造方法,这四个参数依次是 书籍名称、 价格、 作者、 出版年份 。裁判测试程序样例:import java.util.*;public class Main { public static void main(String[] args) { List <Book>_6-1 book类的设计java
基于微信小程序的校园导航小程序设计与实现_校园导航微信小程序系统的设计与实现-程序员宅基地
文章浏览阅读613次,点赞28次,收藏27次。相比于以前的传统手工管理方式,智能化的管理方式可以大幅降低学校的运营人员成本,实现了校园导航的标准化、制度化、程序化的管理,有效地防止了校园导航的随意管理,提高了信息的处理速度和精确度,能够及时、准确地查询和修正建筑速看等信息。课题主要采用微信小程序、SpringBoot架构技术,前端以小程序页面呈现给学生,结合后台java语言使页面更加完善,后台使用MySQL数据库进行数据存储。微信小程序主要包括学生信息、校园简介、建筑速看、系统信息等功能,从而实现智能化的管理方式,提高工作效率。
有状态和无状态登录
传统上用户登陆状态会以 Session 的形式保存在服务器上,而 Session ID 则保存在前端的 Cookie 中;而使用 JWT 以后,用户的认证信息将会以 Token 的形式保存在前端,服务器不需要保存任何的用户状态,这也就是为什么 JWT 被称为无状态登陆的原因,无状态登陆最大的优势就是完美支持分布式部署,可以使用一个 Token 发送给不同的服务器,而所有的服务器都会返回同样的结果。有状态和无状态最大的区别就是服务端会不会保存客户端的信息。
九大角度全方位对比Android、iOS开发_ios 开发角度-程序员宅基地
文章浏览阅读784次。发表于10小时前| 2674次阅读| 来源TechCrunch| 19 条评论| 作者Jon EvansiOSAndroid应用开发产品编程语言JavaObjective-C摘要:即便Android市场份额已经超过80%,对于开发者来说,使用哪一个平台做开发仍然很难选择。本文从开发环境、配置、UX设计、语言、API、网络、分享、碎片化、发布等九个方面把Android和iOS_ios 开发角度
搜索引擎的发展历史
搜索引擎的发展历史可以追溯到20世纪90年代初,随着互联网的快速发展和信息量的急剧增加,人们开始感受到了获取和管理信息的挑战。这些阶段展示了搜索引擎在技术和商业模式上的不断演进,以满足用户对信息获取的不断增长的需求。
随便推点
控制对象的特性_控制对象特性-程序员宅基地
文章浏览阅读990次。对象特性是指控制对象的输出参数和输入参数之间的相互作用规律。放大系数K描述控制对象特性的静态特性参数。它的意义是:输出量的变化量和输入量的变化量之比。时间常数T当输入量发生变化后,所引起输出量变化的快慢。(动态参数) ..._控制对象特性
FRP搭建内网穿透(亲测有效)_locyanfrp-程序员宅基地
文章浏览阅读5.7w次,点赞50次,收藏276次。FRP搭建内网穿透1.概述:frp可以通过有公网IP的的服务器将内网的主机暴露给互联网,从而实现通过外网能直接访问到内网主机;frp有服务端和客户端,服务端需要装在有公网ip的服务器上,客户端装在内网主机上。2.简单的图解:3.准备工作:1.一个域名(www.test.xyz)2.一台有公网IP的服务器(阿里云、腾讯云等都行)3.一台内网主机4.下载frp,选择适合的版本下载解压如下:我这里服务器端和客户端都放在了/usr/local/frp/目录下4.执行命令# 服务器端给执_locyanfrp
UVA 12534 - Binary Matrix 2 (网络流‘最小费用最大流’ZKW)_uva12534-程序员宅基地
文章浏览阅读687次。题目:http://acm.hust.edu.cn/vjudge/contest/view.action?cid=93745#problem/A题意:给出r*c的01矩阵,可以翻转格子使得0表成1,1变成0,求出最小的步数使得每一行中1的个数相等,每一列中1的个数相等。思路:网络流。容量可以保证每一行和每一列的1的个数相等,费用可以算出最小步数。行向列建边,如果该格子是_uva12534
免费SSL证书_csdn alphassl免费申请-程序员宅基地
文章浏览阅读504次。1、Let's Encrypt 90天,支持泛域名2、Buypass:https://www.buypass.com/ssl/resources/go-ssl-technical-specification6个月,单域名3、AlwaysOnSLL:https://alwaysonssl.com/ 1年,单域名 可参考蜗牛(wn789)4、TrustAsia5、Alpha..._csdn alphassl免费申请
测试算法的性能(以选择排序为例)_算法性能测试-程序员宅基地
文章浏览阅读1.6k次。测试算法的性能 很多时候我们需要对算法的性能进行测试,最简单的方式是看算法在特定的数据集上的执行时间,简单的测试算法性能的函数实现见testSort()。【思想】:用clock_t计算某排序算法所需的时间,(endTime - startTime)/ CLOCKS_PER_SEC来表示执行了多少秒。【关于宏CLOCKS_PER_SEC】:以下摘自百度百科,“CLOCKS_PE_算法性能测试
Lane Detection_lanedetectionlite-程序员宅基地
文章浏览阅读1.2k次。fromhttps://towardsdatascience.com/finding-lane-lines-simple-pipeline-for-lane-detection-d02b62e7572bIdentifying lanes of the road is very common task that human driver performs. This is important ..._lanedetectionlite