线性判别分析LDA((公式推导+举例应用))_lda推导-程序员宅基地
技术标签: 机器学习
引言
线性判别分析(Linear Discriminant Analysis,简称LDA)是一种经典的监督学习算法,其主要目标是通过在降维的同时最大化类别之间的差异,为分类问题提供有效的数据表征。LDA不同于一些无监督降维方法,如主成分分析(PCA),它充分利用了类别信息,通过寻找最佳投影方向,使得不同类别的样本在降维后的空间中有最大的类间距离,同时保持同一类别内的样本尽量接近。
LDA的基本思想是通过最大化类别间的散布矩阵与类别内的散布矩阵的比值,来实现对数据的降维。在这个过程中,LDA通过解决广义特征值问题,找到了最优的投影方向,从而能够将原始高维数据映射到一个维度更低的空间中,同时保留了最重要的类别间信息。
模型表达式
我们先定义两个变量
- 类别内散布矩阵:反应同一个类别内数据的离散程度。
S w = ∑ x ∈ X 0 ( x − μ 0 ) ( x − μ 0 ) T + ∑ x ∈ X 1 ( x − μ 1 ) ( x − μ 1 ) T S_w=\sum_{x\in X_0}(x-\mu_0)(x-\mu_0)^T+\sum_{x\in X_1}(x-\mu_1)(x-\mu_1)^T Sw=x∈X0∑(x−μ0)(x−μ0)T+x∈X1∑(x−μ1)(x−μ1)T - 类别间散布矩阵:反应不同类别间数据的离散程度。
S b = ( μ 0 − μ 1 ) ( μ 0 − μ 1 ) T S_b=(\mu_0-\mu_1)(\mu_0-\mu_1)^T Sb=(μ0−μ1)(μ0−μ1)T
其中, X i X_i Xi、 μ i \mu_i μi分别表示第 i ∈ { 0 , 1 } i\in \{0,1\} i∈{ 0,1}类示例的集合和均值向量。
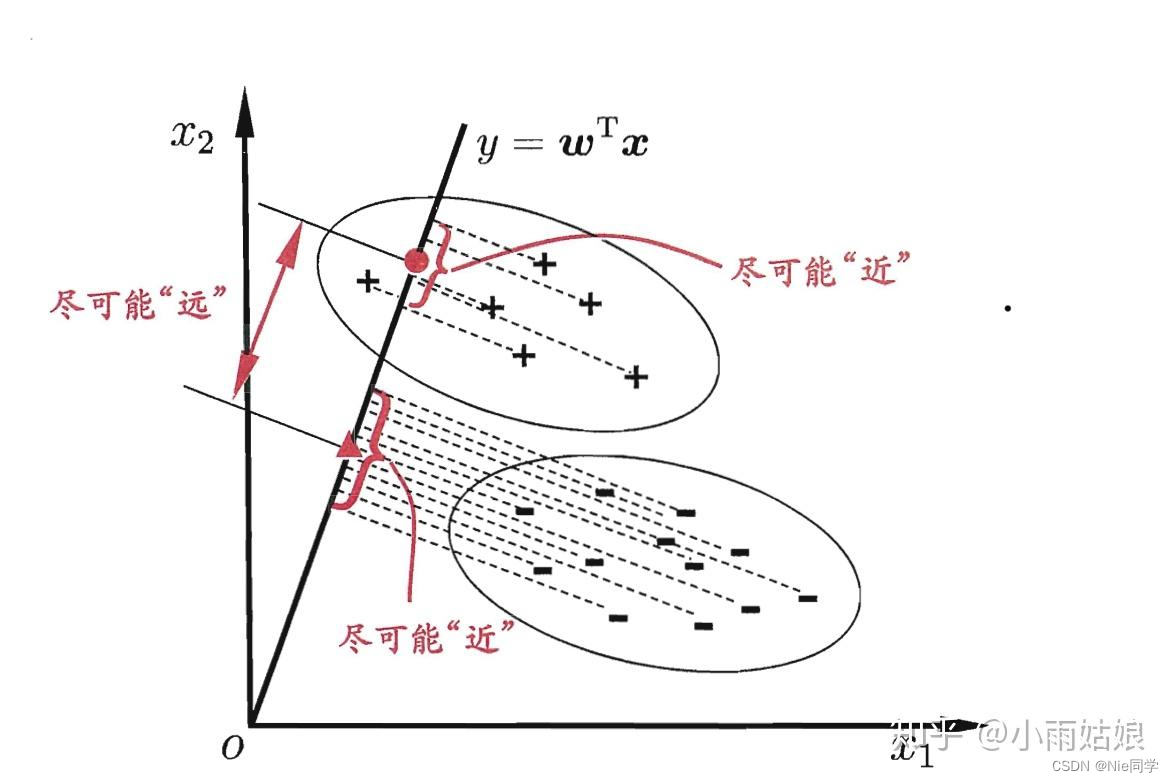
我们的目标欲使同类样例的投影点尽可能的相近,即 S w S_w Sw尽可能的小。而欲使异类的样例投影点尽可能远离,即 S b S_b Sb尽可能大。同时考虑二者,则可得到欲最大化的目标:
J = w T S b w w T S w w J=\frac{w^TS_bw}{w^TS_ww} J=wTSwwwTSbw
拉格朗日乘子法
我们可以发现 J J J的解与 w w w长度无关,只与 w w w的方向有关。不失一般性,令 w T S w w = 1 w^TS_ww=1 wTSww=1,则可等价于算以下式子:
m i n w − w T S b w s . t . w T S w w = 1 \begin{align*} min_w\ -w^TS_bw \\ s.t. \quad w^TS_ww=1 \end{align*} minw −wTSbws.t.wTSww=1
由拉格朗日乘子法,上式等价于:
S b w = λ S w w S_bw=\lambda S_ww Sbw=λSww
其中 λ \lambda λ是拉格朗日乘子法。
{ S b w = λ S w w S b w = ( μ 0 − μ 1 ) ( μ 0 − μ 1 ) T w \begin{cases} S_bw=\lambda S_ww\\ S_bw=(\mu_0-\mu_1)(\mu_0-\mu_1)^Tw \end{cases} {
Sbw=λSwwSbw=(μ0−μ1)(μ0−μ1)Tw
又因为 ( μ 0 − μ 1 ) T w (\mu_0-\mu_1)^Tw (μ0−μ1)Tw是标量,又因为只与方向有关,可令 ( μ 0 − μ 1 ) T w = C (\mu_0-\mu_1)^Tw=C (μ0−μ1)Tw=C,联立可解得
λ C S w w = ( μ 0 − μ 1 ) \frac{\lambda}{C}S_ww=(\mu_0-\mu_1) CλSww=(μ0−μ1)
只与大小有关,令 λ C = 1 \frac{\lambda}{C}=1 Cλ=1,有
w = S w − 1 ( μ 0 − μ 1 ) w=S_w^{-1}(\mu_0-\mu_1) w=Sw−1(μ0−μ1)
阈值分类器
最终将投影到直线的数据 w T x i w^Tx_i wTxi送入阈值分类器中,而阈值分类器是一类简单的二元分类器,它通过设定一个阈值来决定样本属于哪个类别。
有以下几种阈值分类器:
- 固定阈值分类器:简单的阈值分类器,将某个特征的值与预先设定的阈值进行比较。例如,如果某个特征的值大于阈值,则分类为一类,否则为另一类。
- 百分位阈值分类器:基于数据的百分位进行分类,例如选择数据中的第75百分位作为阈值。这对于处理偏斜分布的数据可能更合适。
- 基于经验法则的分类器:有时候,根据领域专业知识或经验,可以设定一些规则来确定阈值。例如,根据某个特定的业务规则来分类。
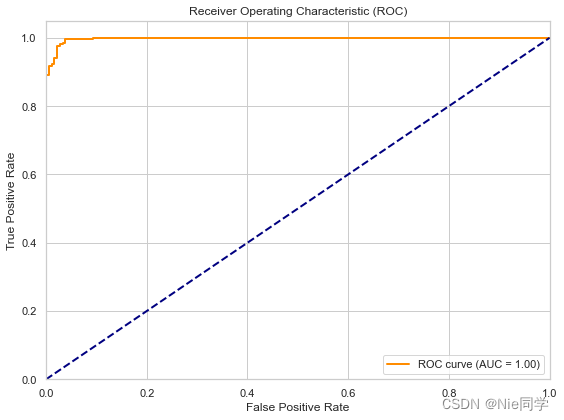
- ROC曲线选择阈值:通过绘制接收者操作特征(ROC)曲线,可以选择最适合任务的阈值。ROC曲线以真正例率和假正例率为横纵坐标,通过改变阈值,可以得到不同的点,选择最适合的操作点作为阈值。
- 最大化特定性或敏感性:有时根据任务需求,可以选择使得分类器具有最大特定性或最大敏感性的阈值。
- 基于平均值的分类器:基于平均值的阈值分类器是一种简单的二元分类方法,其原理是将数据集中某个特征的值与该特征的平均值进行比较,然后根据比较结果将数据分为两个类别。
结论
通过深入分析线性判别分析(Linear Discriminant Analysis,简称LDA)的基本思想和模型表达式,以及阈值分类器的选择方式,我们得出以下结论:
LDA的核心思想是在降维的同时最大化类别之间的差异,通过寻找最佳投影方向,使得不同类别的样本在降维后的空间中有最大的类间距离,同时保持同一类别内的样本尽量接近。该方法不同于一些无监督降维方法,如主成分分析(PCA),因为它充分利用了类别信息。
模型表达式中,我们定义了类别内散布矩阵 S w S_w Sw和类别间散布矩阵 S b S_b Sb,并通过最大化二者比值来找到最优的投影方向。使用拉格朗日乘子法,我们导出了投影方向 w w w的表达式,即 w = S w − 1 ( μ 0 − μ 1 ) w=S_w^{-1}(\mu_0-\mu_1) w=Sw−1(μ0−μ1)。
在阈值分类器的选择方面,我们介绍了几种不同的方法,包括固定阈值分类器、百分位阈值分类器、基于经验法则的分类器、ROC曲线选择阈值、最大化特定性或敏感性的分类器以及基于平均值的分类器。这些分类器可根据具体任务需求和数据特点进行选择。
在实际应用中,我们需要根据任务需求和数据特点选择合适的阈值分类器,并通过绘制ROC曲线等方式来评估模型性能。不同的任务可能需要权衡分类器的特定性和敏感性,或者根据领域专业知识设定阈值,以达到更好的分类效果。
综上所述,LDA作为一种经典的监督学习算法,通过降维和分类任务中的优异性能,在实际应用中具有广泛的应用前景。合理选择阈值分类器,结合领域专业知识,能够更好地发挥LDA在数据表征和分类方面的优势。
实验分析
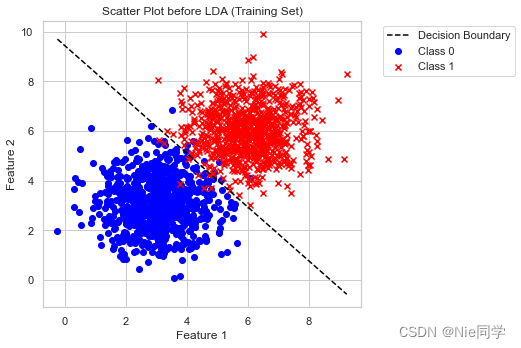
以下是特征1、特征2对应类别的数据集。
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
sns.set(context="notebook", style="whitegrid", palette="deep")
# 读入数据集
data = pd.read_csv('data/lda_dataset.csv')
# 提取特征和标签
X = data[['Feature_1', 'Feature_2']].values
y = data['Label'].values
# 将数据集分割为训练集和测试集
train_size = int(0.8 * len(X))
X_train, y_train = X[:train_size], y[:train_size]
X_test, y_test = X[train_size:], y[train_size:]
# 计算类别均值
mean_class0 = np.mean(X_train[y_train == 0], axis=0)
mean_class1 = np.mean(X_train[y_train == 1], axis=0)
# 计算类内散度矩阵(Within-class scatter matrix)
Sw = np.dot((X_train[y_train == 0] - mean_class0).T, (X_train[y_train == 0] - mean_class0)) + np.dot((X_train[y_train == 1] - mean_class1).T, (X_train[y_train == 1] - mean_class1))
# 计算类间散度矩阵(Between-class scatter matrix)
Sb = np.outer((mean_class0 - mean_class1), (mean_class0 - mean_class1))
# 计算广义特征值问题的解
eigenvalues, eigenvectors = np.linalg.eig(np.linalg.inv(Sw).dot(Sb))
# 选取前N-1个特征向量
sorted_indices = np.argsort(eigenvalues)[::-1]
w = eigenvectors[:, sorted_indices[:1]]
# 投影训练数据
X_train_lda = np.dot(X_train, w)
# 投影测试数据
X_test_lda = np.dot(X_test, w)
- 采用基于平均值的分类器
from sklearn.metrics import accuracy_score, confusion_matrix, classification_report
# 定义简单的线性阈值分类器
threshold = np.mean(X_train_lda)
y_pred_train = (X_train_lda > threshold).astype(int)
y_pred_test = (X_test_lda > threshold).astype(int)
# 绘制决策边界
threshold = np.dot((mean_class0 + mean_class1) / 2, w)
x_boundary = np.linspace(min(X[:, 0]), max(X[:, 0]), 100)
y_boundary = (threshold - x_boundary * w[0]) / w[1]
# 绘制投影前的散点图
plt.figure(figsize=(12, 5))
plt.subplot(1, 2, 1)
plt.scatter(X_train[y_train == 0][:, 0], X_train[y_train == 0][:, 1], c='blue', label='Class 0', marker='o')
plt.scatter(X_train[y_train == 1][:, 0], X_train[y_train == 1][:, 1], c='red', label='Class 1', marker='x')
plt.title('Scatter Plot before LDA (Training Set)')
plt.plot(x_boundary, y_boundary, color='black', linestyle='--', label='Decision Boundary')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend(bbox_to_anchor=(1.05, 1), loc='upper left')
plt.tight_layout()
plt.show()
# 输出准确率、混淆矩阵和分类报告
print("Testing Accuracy:", accuracy_score(y_test, y_pred_test))
conf_matrix_test = confusion_matrix(y_test, y_pred_test)
print("Confusion Matrix (Testing Set):\n", conf_matrix_test)
class_report_test = classification_report(y_test, y_pred_test)
print("Classification Report (Testing Set):\n", class_report_test)
Testing Accuracy: 0.975
Confusion Matrix (Testing Set):
[[178 4]
[ 6 212]]
Classification Report (Testing Set):
precision recall f1-score support
0 0.97 0.98 0.97 182
1 0.98 0.97 0.98 218
accuracy 0.97 400
macro avg 0.97 0.98 0.97 400
weighted avg 0.98 0.97 0.98 400
- 测试准确度: 0.975
- 精确度: 分类为正例的样本中,实际为正例的比例。对于类别0和类别1,分别为0.97和0.98。
- 召回率: 实际为正例的样本中,被成功分类为正例的比例。对于类别0和类别1,分别为0.98和0.97。
- F1分数: 精确度和召回率的加权调和平均。对于类别0和类别1,分别为0.97和0.98。
综合而言,该模型在测试集上取得了较高的准确性,混淆矩阵显示了良好的分类结果,而分类报告进一步确认了其在精确度、召回率和F1分数上的优越表现。
- 采用ROC曲线选择阈值
from sklearn.metrics import roc_curve, roc_auc_score
# 计算 ROC 曲线
fpr, tpr, thresholds = roc_curve(y_test, X_test_lda)
# 计算 AUC
roc_auc = roc_auc_score(y_test, X_test_lda)
# 绘制 ROC 曲线
plt.figure(figsize=(8, 6))
plt.plot(fpr, tpr, color='darkorange', lw=2, label='ROC curve (AUC = {:.2f})'.format(roc_auc))
plt.plot([0, 1], [0, 1], color='navy', lw=2, linestyle='--')
plt.xlim([0.0, 1.0])
plt.ylim([0.0, 1.05])
plt.xlabel('False Positive Rate')
plt.ylabel('True Positive Rate')
plt.title('Receiver Operating Characteristic (ROC)')
plt.legend(loc='lower right')
plt.tight_layout()
plt.show()
# 选择最佳阈值
best_threshold_index = np.argmax(tpr - fpr)
best_threshold = thresholds[best_threshold_index]
# 根据最佳阈值重新定义分类器结果
y_pred_best_threshold_test = (X_test_lda > best_threshold).astype(int)
# 计算决策边界
x_values = np.linspace(min(X[:, 0]), max(X[:, 0]), 100)
y_values = (best_threshold - x_values * w[0]) / w[1]
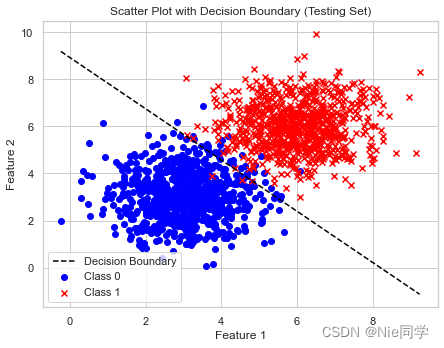
# 绘制散点图和决策边界(在原始特征空间中)
plt.figure(figsize=(12, 5))
# 散点图
plt.subplot(1, 2, 1)
plt.scatter(X_train[y_train == 0][:, 0], X_train[y_train == 0][:, 1], c='blue', label='Class 0', marker='o')
plt.scatter(X_train[y_train == 1][:, 0], X_train[y_train == 1][:, 1], c='red', label='Class 1', marker='x')
plt.plot(x_values, y_values, color='black', linestyle='--', label='Decision Boundary')
plt.title('Scatter Plot before LDA (Testing Set)')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend()
plt.title('Scatter Plot with Decision Boundary (Testing Set)')
plt.xlabel('Feature 1')
plt.ylabel('Feature 2')
plt.legend()
plt.tight_layout()
plt.show()
# 输出准确率、混淆矩阵和分类报告(使用最佳阈值)
print("Testing Accuracy (Best Threshold):", accuracy_score(y_test, y_pred_best_threshold_test))
conf_matrix_test_best_threshold = confusion_matrix(y_test, y_pred_best_threshold_test)
print("Confusion Matrix (Testing Set - Best Threshold):\n", conf_matrix_test_best_threshold)
class_report_test_best_threshold = classification_report(y_test, y_pred_best_threshold_test)
print("Classification Report (Testing Set - Best Threshold):\n", class_report_test_best_threshold)
Testing Accuracy (Best Threshold): 0.9775
Confusion Matrix (Testing Set - Best Threshold):
[[175 7]
[ 2 216]]
Classification Report (Testing Set - Best Threshold):
precision recall f1-score support
0 0.99 0.96 0.97 182
1 0.97 0.99 0.98 218
accuracy 0.98 400
macro avg 0.98 0.98 0.98 400
weighted avg 0.98 0.98 0.98 400
- 测试准确度: 0.9775
- 精确度: 模型正确预测正类别的概率。在测试集上,正类别的精确度为 0.97。
- 召回率: 模型正确预测正类别的概率。在测试集上,正类别的精确度为 0.97。
- F1分数: 精确度和召回率的调和平均值。在测试集上,F1-score 为 0.98。
总体而言,模型在测试集上取得了很好的性能,具有高的准确率、精确度和召回率。
两种选择阈值策略的对比:
- 采用 ROC 曲线选择阈值的策略在准确率上略微优于基于平均值的分类器。
- 采用 ROC 曲线选择阈值的策略在混淆矩阵和分类报告中显示更多的 True Positive(TP)和稍少的 False Positive(FP)。
- 两种策略都表现出很高的准确率、精确度、召回率和 F1 分数,但采用 ROC 曲线选择阈值的策略在某些指标上稍微更优。
综合而言,两种策略都取得了良好的性能,但具体选择哪种策略可能取决于任务的具体需求和偏好。
智能推荐
获取当前路由地址_能获取前端路由的地址吗-程序员宅基地
文章浏览阅读103次。【代码】获取当前路由地址。_能获取前端路由的地址吗
北斗卫星在桥隧坡施工中的技术应用与创新-程序员宅基地
文章浏览阅读253次。幸运的是,随着我国北斗卫星导航系统的完善和推广应用,其在桥隧坡施工中的技术运用不断深化,成为提高施工效率、确保工程质量的利器。在桥隧坡等基础设施建设中,运用北斗系统实现施工设备的智能调度、资源优化配置等,不仅提高了施工智能化水平,也为保障工程建设安全提供了有力支持。对于坡面工程,北斗卫星导航系统的作用同样不可忽视。隧道施工环境复杂,传统的测量技术往往难以满足精度要求,在此情况下,北斗系统可通过设置多个基准站,实时监控隧道施工过程中的线路偏差,确保隧道掘进方向的精准,大幅提升隧道施工的安全性和可靠性。
Android 数据存储 (二)文件存储_android 文件存储内部价存储项目报错-程序员宅基地
文章浏览阅读1.2k次。转载请注明出处:http://blog.csdn.net/vnanyesheshou/article/details/71106622之前说了下Android中Sharedpreferences、SQLite Databases的使用,不太会这两个的可以参考这两篇文章: Android 数据存储 (一)SharedPreferences、 Android 数据存储 (三)SQLite Databases。_android 文件存储内部价存储项目报错
猿实战17——实现你未必知晓的运费模板-程序员宅基地
文章浏览阅读621次。猿实战是一个原创系列文章,通过实战的方式,采用前后端分离的技术结合SpringMVC Spring Mybatis,手把手教你撸一个完整的电商系统,变身猿人找到工作不是问题。还等什么呢?..._前端运费模板怎么写
使用腾讯云部署我的个人网站-程序员宅基地
文章浏览阅读79次。使用wget然后解压 tar -xvf node-v18.17.1-linux-x64.tar.xz去到目录下测试node是否安装成功,cd node-v18.17.1-linux-x64/bin,发现失败原因,node版本过高,当前centos版本不支持,解决办法,安装16.20.2版本node,测试安装成功。设置全局软链使用,可以在用户家目录~下使用mv node-v16.20.2-linux-x64 nodejs修改名字初次设置时候源文件路径没有正确,ln -s 源文件路径 目标路径。
存储卡乱码:原因、恢复与预防全攻略_存储卡 文件 电脑 乱码-程序员宅基地
文章浏览阅读906次,点赞20次,收藏17次。最后,不当的操作,如错误的格式化或删除操作,也可能导致乱码问题的发生。在未来使用存储卡的过程中,我们应更加注意数据的安全性和完整性,确保我们的数字生活更加顺畅和美好。首先,我们要明白,存储卡内部的数据是以特定的编码和格式进行存储的。在使用数之寻软件时,我们只需按照软件的提示进行操作,选择相应的存储卡进行扫描,并等待软件完成扫描和修复过程。在扫描过程中,软件会列出所有可恢复的文件,我们可以根据需要选择要恢复的文件,并将其保存到安全的位置。同时,我们需要提前了解数据恢复服务的流程和费用,以便做好相应的准备。_存储卡 文件 电脑 乱码
随便推点
Hexo博客中使用标签云hexo-tag-cloud_hexo插入标签云-程序员宅基地
文章浏览阅读9.6k次。Hexo博客中使用标签云hexo-tag-cloud在github上标签云使用教程中,按照步骤添加配置后不能添加标签云,后考虑解决方案如下: 1. 添加依赖问题 - go into your hexo system folder, and add depandence “hexo-tag-cloud”: “2.0.*” to package.json在根目录文件package.json文件_hexo插入标签云
Spring Boot 注入外部配置到应用内部的静态变量_springboot环境变量怎么动态注入到静态变量中-程序员宅基地
文章浏览阅读454次。Spring Boot允许你外部化你的配置,这样你就可以在不同的环境中使用相同的应用程序代码,你可以使用properties文件、YAML文件、环境变量和命令行参数来外部化配置,属性值可以通过使用@Value注解直接注入到你的bean中,通过Spring的Environment抽象访问,或者通过@ConfigurationProperties绑定到结构化对象。那么如何进行Spring Boot ..._springboot环境变量怎么动态注入到静态变量中
Unity遇到VSCODE无法自动补全解决办法_attempted to update project that is not loaded: as-程序员宅基地
文章浏览阅读2.3k次。Unity遇到VSCODE无法自动补全解决办法错误解决办法方法1方法2错误 Attempted to update project that is not loaded: f:\Unity\StrategyGame\StrategyGameTest\Assembly-CSharp.csproj解决办法方法1先去 C:\Windows\Microsoft.NET\Framework 下,查看NET的版本在vscode中找到 Assembly-CSharp.csproj 文件,把改_attempted to update project that is not loaded: assembly-csharp.csproj
个人博客网页设计html—HTML+CSS+JavaScript制作响应式个人博客模板源码( JavaScript期末大作业 )_powered by wy all rights reserved-程序员宅基地
文章浏览阅读30次。校园篮球网页设计、足球体育运动、体育游泳运动、兵乓球 、网球、等网站的设计与制作。️ 大学生校园运动静态HTML网页设计作品,采用DIV CSS布局制作,内容包括:校园运动、运动技巧、运动规则、技术规则、经典动作。页面主体内容区域宽度为1200PX。网页整体使用CSS设置了网页背景图片。页面精美包含多个排版布局,学生网页作业水平制作。 一套优质的网页设计应该包含 (具体可根据个人要求而定)网站布局方面:计划采用目前主流的、能兼容各大主流浏览器、显示效果稳定的浮动网页布局结构..._powered by wy all rights reserved
HDU_1811 Rank of Tetris-程序员宅基地
文章浏览阅读75次。Rank of Tetris链接HDU_1811 Rank of TetrisDescription自从Lele开发了Rating系统,他的Tetris事业更是如虎添翼,不久他遍把这个游戏推向了全球。为了更好的符合那些爱好者的喜好,Lele又想了一个新点子:他将制作一个全球Tetris高手排行榜,定时更新,名堂要比福布斯富豪榜还响。关于如何排名,这个不用说都知道是根据Rating从高到低来排,如果两个人具有相同的Rating,那就按这几个人的RP从高到低来排。终于,Lele要开始行动了,对N个人
Qt之数据表头增加控件_qtableview表头加控件-程序员宅基地
文章浏览阅读3.7k次,点赞4次,收藏30次。QTableView中不重写QHeadView,增加控件文章目录QTableView中不重写QHeadView,增加控件1、实现效果2、添加控件3、控件事件1、实现效果直接看实现的结果是否满足需求,再来干货!2、添加控件以本次演示为例进行代码讲解,其中各个变量由自己定义的去改变代码最终实现的效果需要自己去设计样式! //初始化表一的model m_model = new ..._qtableview表头加控件