stm32CubeMX,配合Keil,使用HAL库(或标准库)方式进行串口通信_stm32cubemx和keil-程序员宅基地
引言
今天我们学习STM32CubeMX串口的操作,以及HAL库串口的配置,我们会详细的讲解各个模块的使用和具体功能,并且基于HAL库实现Printf函数功能重定向,USART中断接收,本系列教程将HAL库与STM32CubeMX结合在一起讲解,使您可以更快速的学会各个模块的使用
前言
例如:随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习的基础内容。
一、串口通信介绍
1. 串口通信
串口通信是指外设和计算机间,通过数据信号线 、地线、控制线等,按位进行传输数据的一种通讯方式,如SPI通信、USART通信、EEPROM通信等。简单讲,串口通信实现了上位机(PC)与下位机(如STM32)之间的信息交互。
上位机(PC)通过串口调试助手等实现数据的接收和发送;
下位机(STM32)通过printf()、getchar()等函数实现字符或字符串的接收和发送。
2. 串口通信的分类:
处理器与外部设备通信有两种方式:
2.1 串行通信
数据按位顺序依次传输,如8个数据位依次传输,速度慢,但占用引脚资源少。
按照数据传送方向,又分为:
单工:数据传输只支持数据在一个方向上传输。(只收不发或者只发不收,模式固定)
单双工:允许数据在两个方向上传输,但是在某一时刻,只允许数据在一个方向上传输。(能发能收,但不能同时进行)
全双工:允许数据同时在两个方向上传输。(能发能收,且能同时进行)
2.2 并行通信
数据各个位同时传输,如8个数据位同时传输,占用引脚资源慢,但速度快。
3. 串行通信
串行通信按通信的方式可分为:
同步通信:带时钟同步信号传输,如SPI、IIC通信等
异步通信:不带时钟同步信号,如UART(通用异步收发器)、单总线等。

4.STM32的串口通信接口
UART:通用异步收发器
USART:通用同步/异步收发器(两种模式可切换)
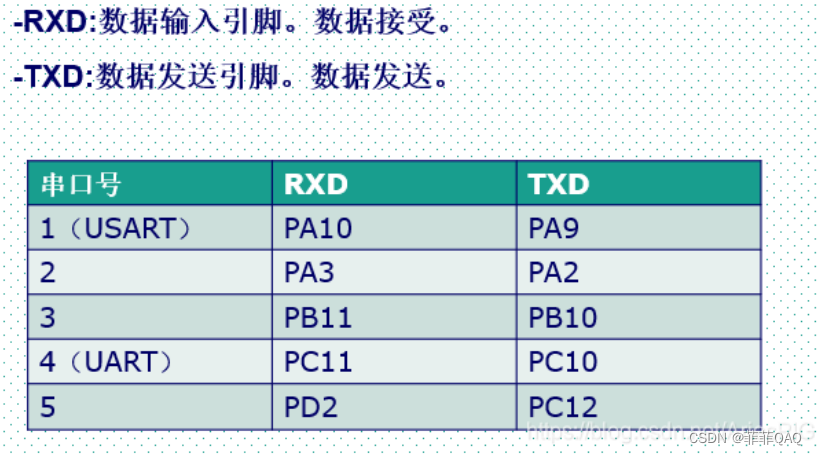
STM32F103系列提供5路串口,包含3个 USART 和2个 UART 。
串口的引脚如下图所示:
5.数据传输的格式/通信协议
串行通信一定要有适合的通信协议。
通信协议指通信双方之间为完成信息交互所必须遵守的一种规则和约定。比如两个人约定在何时交流、用中文还是英文交流、交流什么内容。
1.起始位
当未有数据发送时,数据线处于逻辑“1”状态;先发出一个逻辑“0”信号,表示开始传输字符。
2.数据位
紧随起始位之后,数据位表示真正要发送或接收的信息,位数一般有8位或9位
3.奇偶校验位
数据位末尾可以选择是否添加奇偶校验位,用于检测数据传输是否正确
4.停止位
代表信息传输结束的标志位,可以是1位,1.5位或2位。停止位的位数越多,数据传输的速率也越慢。
5.波特率设置
波特率表示每秒钟传输码元的个数,是衡量数据传输速率的指标,单位Baud。另外有个名词叫比特率,比特率表示每秒钟传输二进制位bit的个数,单位 bit/s。
比特(bit)就是指一位信息,当用二进制表示数据时,0是一位,1也是一位信息,它是固定不变的,一个比特就代表二进制下的一位。
通常描述码元,我们会说M进制的码元。比如八进制,我们知道八进制包含0~7共八种数据,而计算机是只识别0,1两种的,我们若是想将这八种数据发送给计算机,可以用3个比特为一组的形式来表示,即000,001,…,111共八组,因而一个八进制的码元就表示携带了3个比特,这时的比特率也就是波特率的3倍。那么,一个M进制的码元,就携带log2 M个比特。
6.USART的使用步骤
串口设置的一般步骤可以总结为如下几个步骤:
1)串口时钟使能 GPIO 时钟使能
2)串口复位
3)GPIO 端口模式设置
4)串口参数初始化
5)开启中断 并且初始化 NVIC(如果需要开启中断才需要这个步骤)
6)使能串口
7)编写中断处理函数
二、准备工具
1、STM32开发板(我的是STM32F103C8T6)
2、STM32CubeMx软件、 IDE: Keil5软件
3、STM32F1xxHAL库
4、串口: 使用USART1 PA9,PA10
三、通过STM32CubeMX配置项目
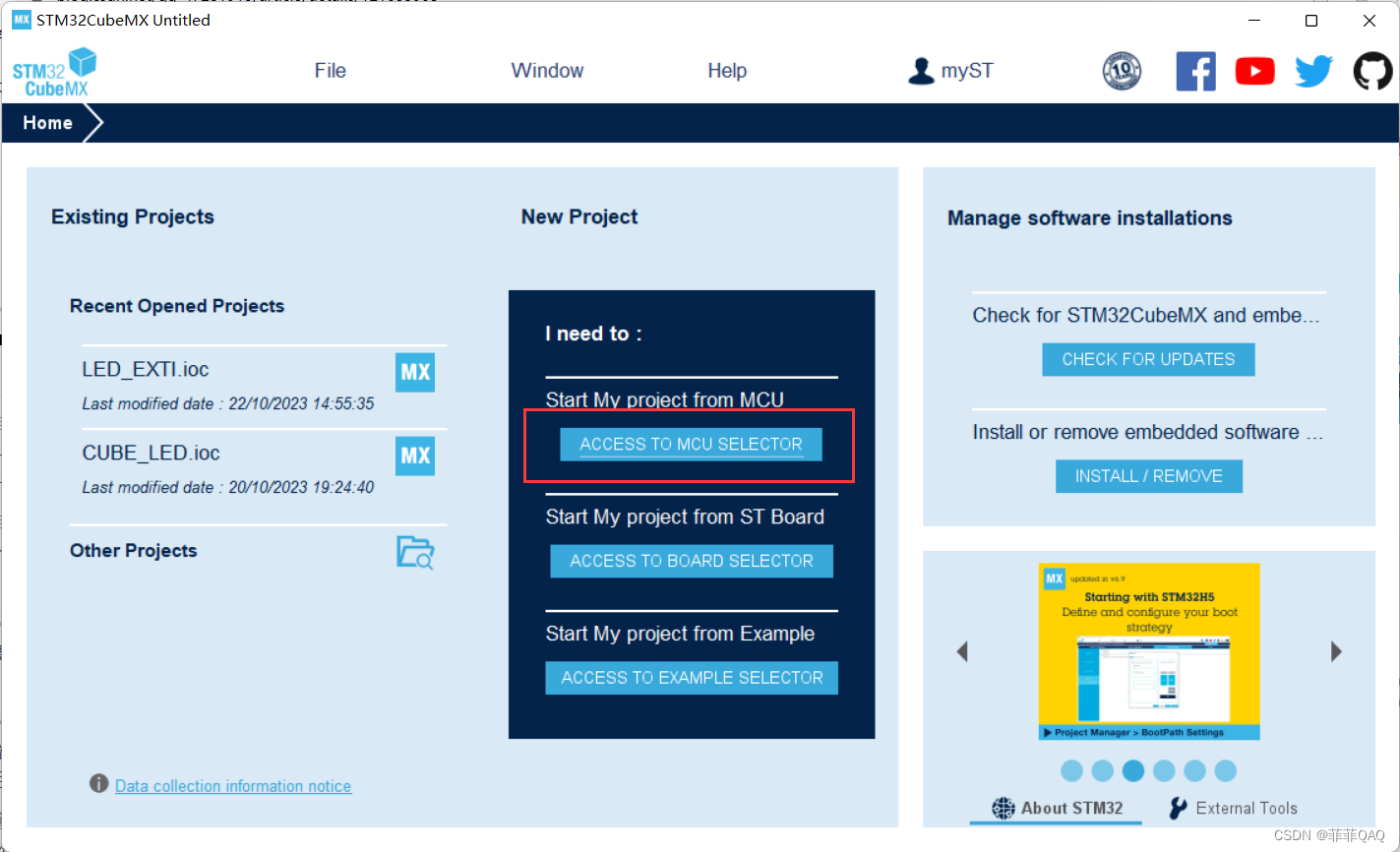
(1)打开STM32CubeMX,在主界面点击:ACCESS TO MCU SELECTOR:
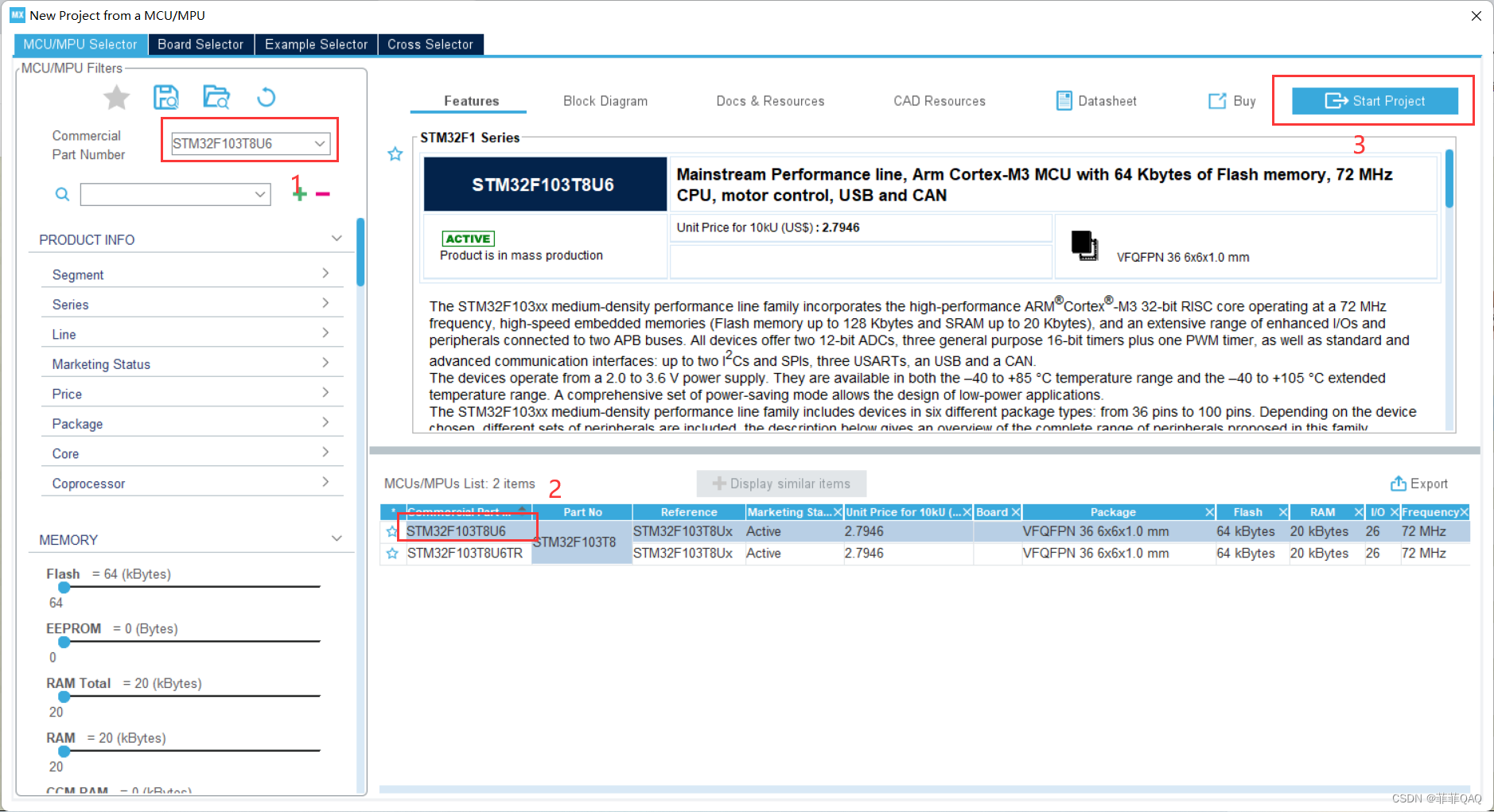
(2)选择的单片机型号STM32F103C8T6以及点击开始工程项目:
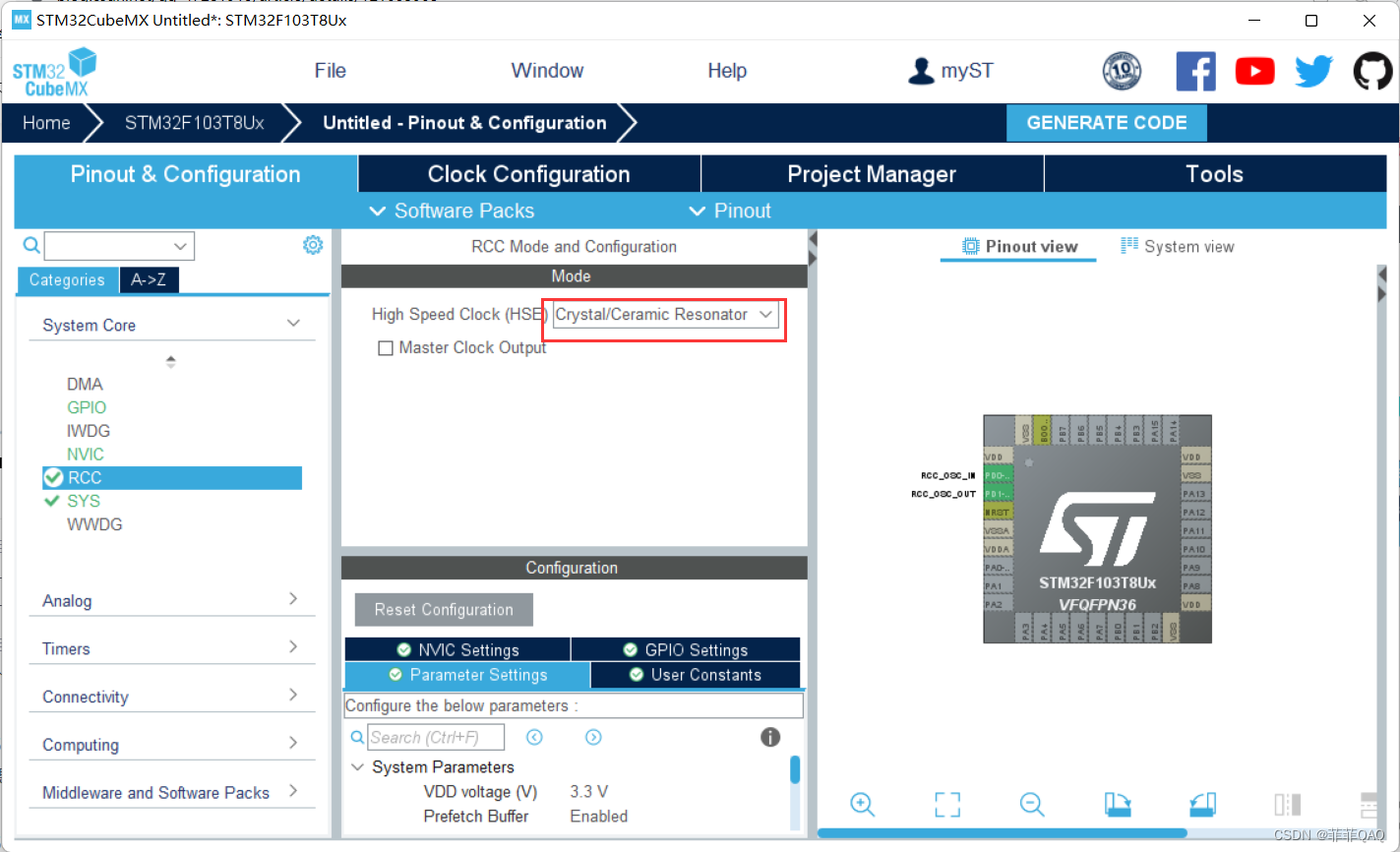
(3)在RCC下开启高速时钟(HSE)选择外部晶振:
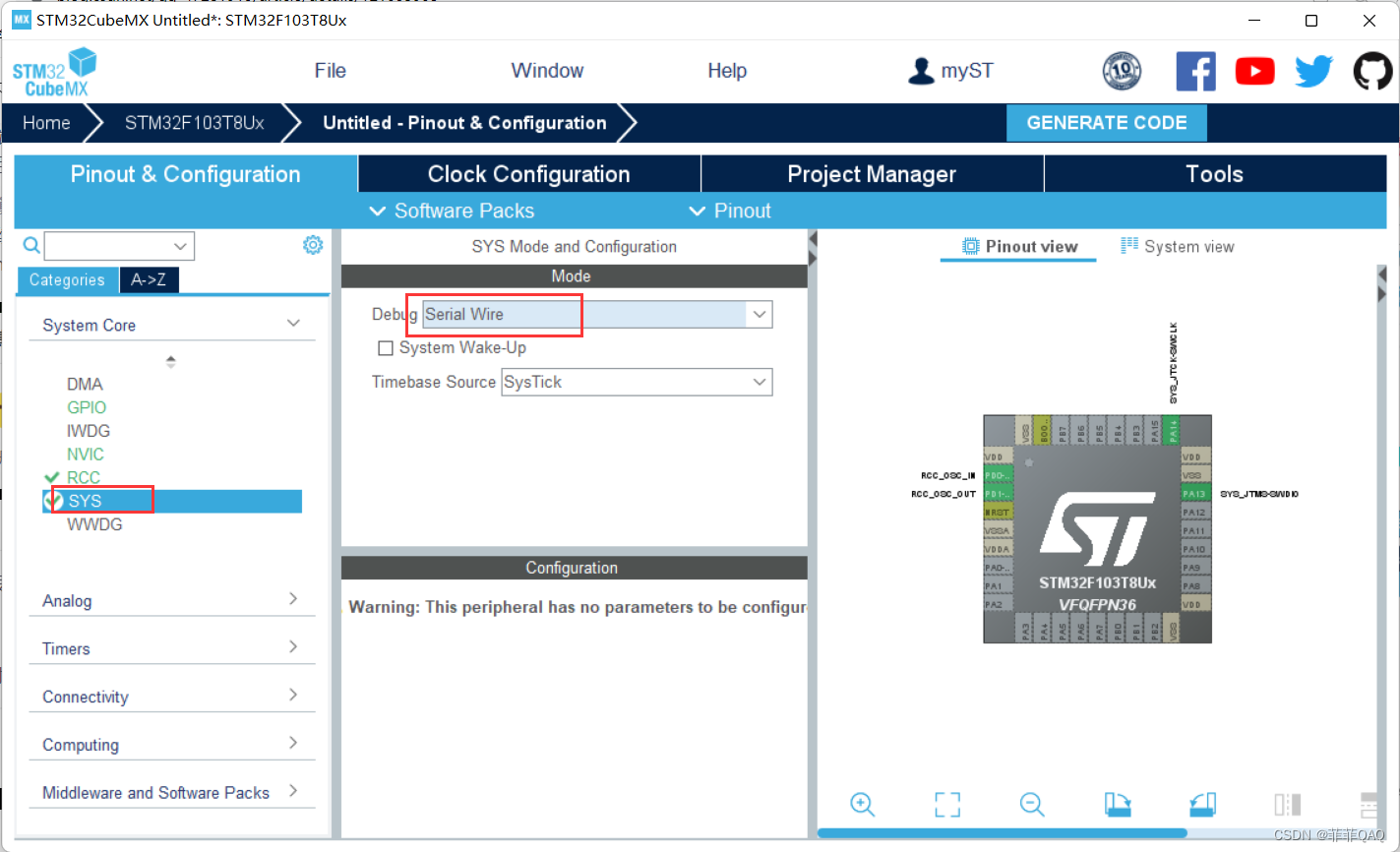
(4)在SYS下选择串口线
(5)选择串口USART1,设置MODE为异步通信(Asynchronous)
基础参数:波特率为115200 Bits/s。传输数据长度为8 Bit。奇偶检验无,停止位1 接收和发送都使能。

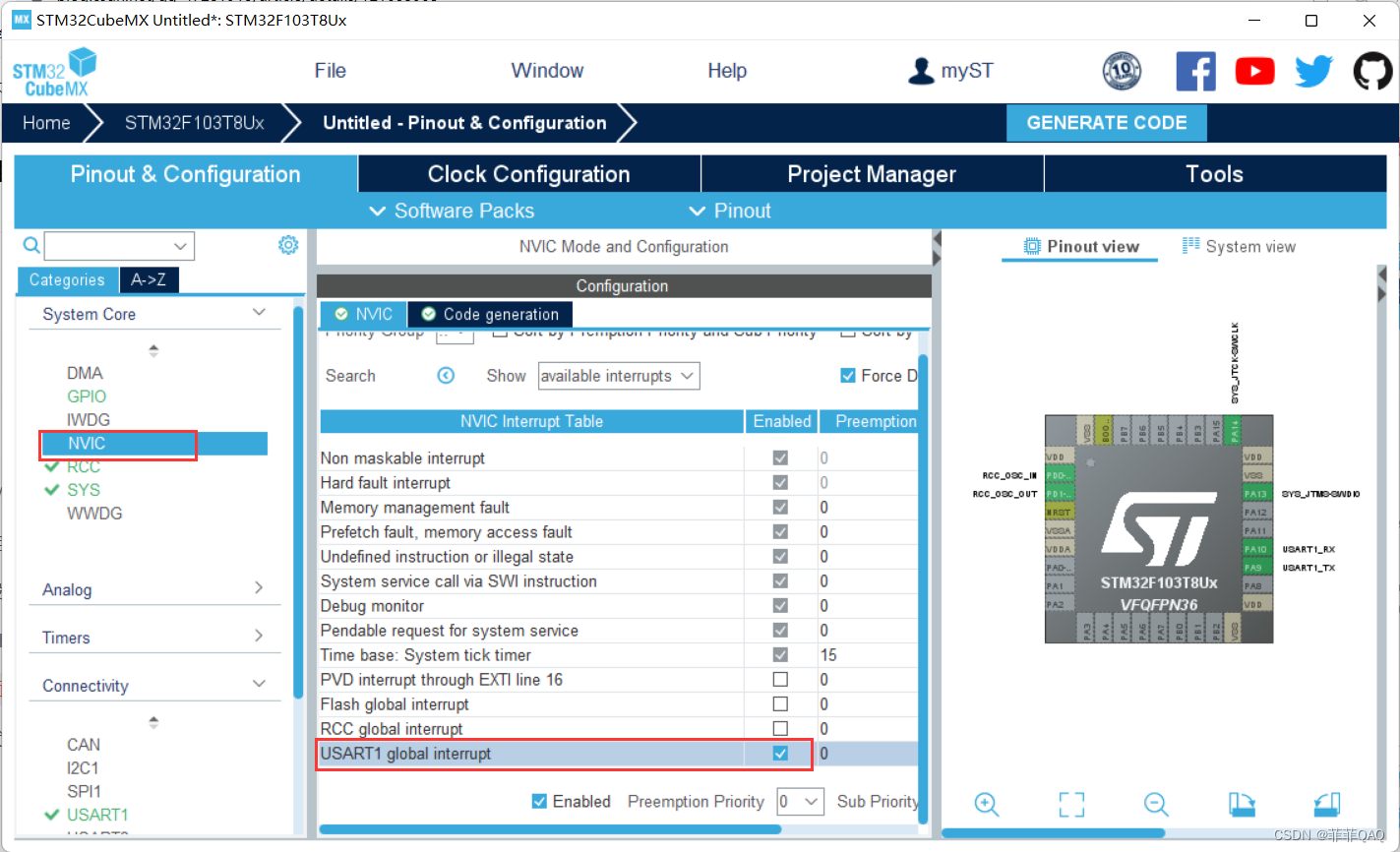
(6)设置NVIC使能接收中断
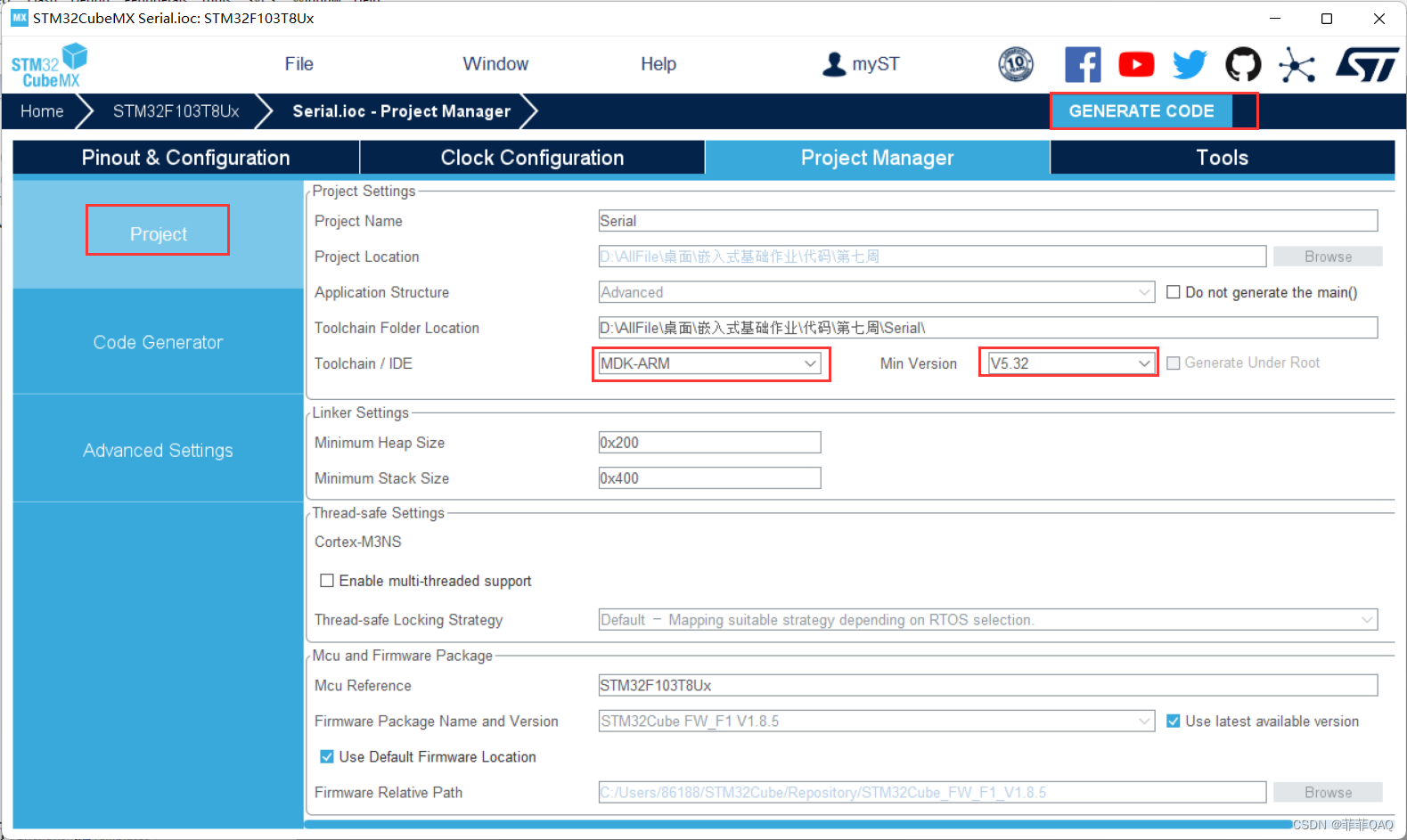
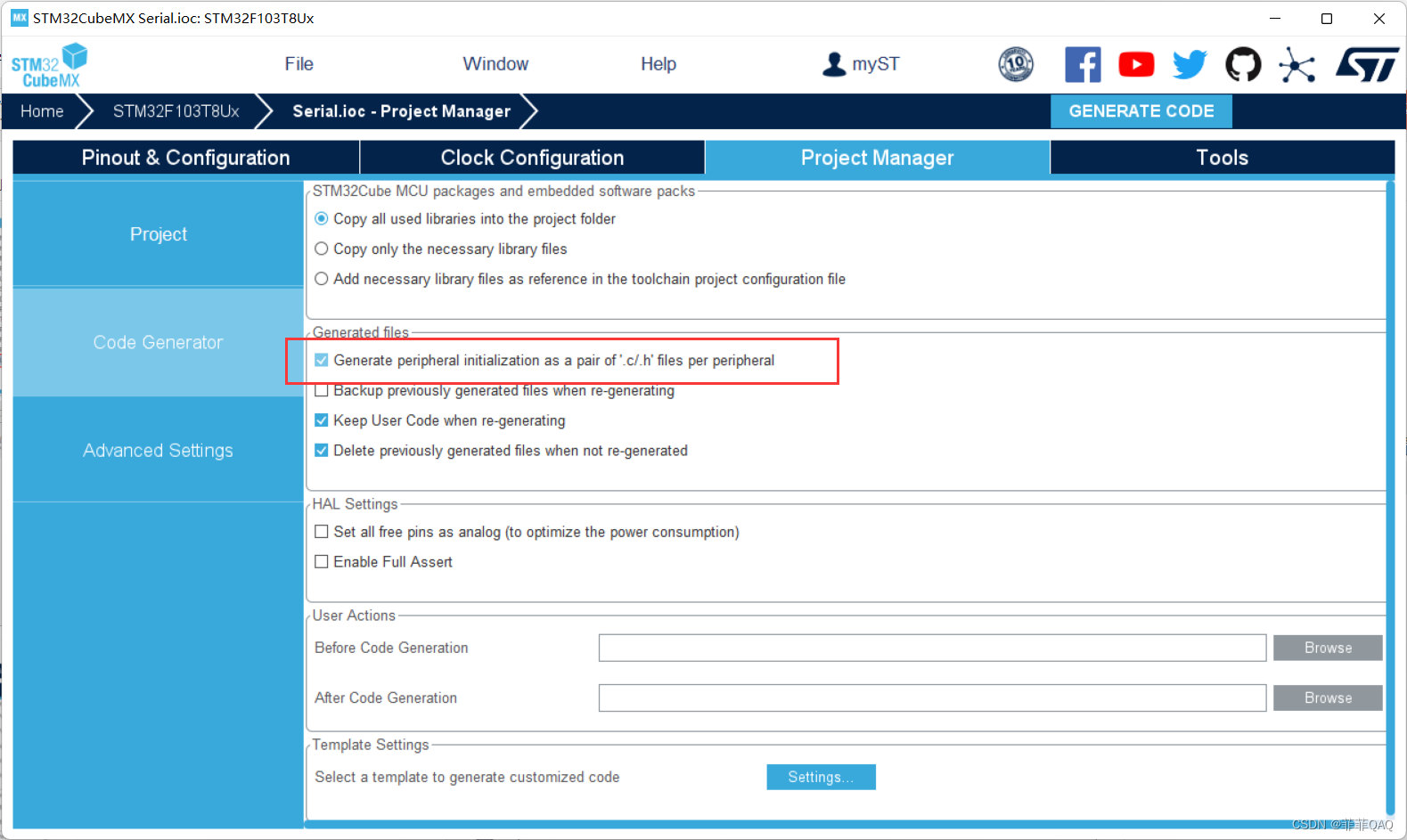
(7)设置项目名称,存储路径以及选择所用IDE,最后创建项目工程文件
四、HAL库USART函数库介绍
1.串口发送/接收函数
HAL_UART_Transmit():串口发送数据,使用超时管理机制;
HAL_UART_Receive():串口接收数据,使用超时管理机制;
HAL_UART_Transmit_IT():串口中断模式发送;
HAL_UART_Receive_IT():串口中断模式接收;
HAL_UART_Transmit_DMA():串口DMA模式发送;
HAL_UART_Transmit_DMA():串口DMA模式接收;
这几个函数的参数基本都是一样的,我们选择两个在代码中用到的详细说明一下:
1.1.串口发送数据函数
函数说明:
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);
功能:
串口发送指定长度的数据。如果超时没发送完成,则不再发送,返回超时标志(HAL_TIMEOUT)。
举例:
HAL_UART_Transmit(&huart1, (uint8_t *)ZZX, 3, 0xffff);
上述函数的意思是串口USART1发送三个字节数据,最大传输时间是0xffff
1.2.中断接收数据函数
中断接收数据:
HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size);
功能:
串口中断接收,以中断方式接收指定长度数据。大致过程是,设置数据存放位置,接收数据长度,然后使能串口接收中断。接收到数据时,会触发串口中断。再然后,串口中断函数处理,直到接收到指定长度数据,而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
举例:
HAL_UART_Receive_IT(&huart1,(uint8_t *)&value,1);
上述函数的意思是触发中断接收一个字符,存储到value中
2.串口中断函数
HAL_UART_IRQHandler(UART_HandleTypeDef *huart): 串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart): 串口发送中断回调函数
HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart): 串口发送一半中断回调函数(用的较少)
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart): 串口接收中断回调函数
HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart):串口接收一半回调函数(用的较少)
HAL_UART_ErrorCallback():串口接收错误函数
选择两个在代码中用到的详细说明一下:
2.1 串口接收中断回调函数
串口接收中断回调:
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);
功能:
HAL库的中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码, 串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改
举例:
HAL_UART_RxCpltCallback(&huart1){ //用户自定义的代码 }
2.2 串口中断处理函数
串口中断处理:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart);
功能:
对接收到的数据进行判断和处理 判断是发送中断还是接收中断,然后进行数据的发送和接收,在中断服务函数中使用。如果接收数据,则会进行接收中断处理函数;如果发送数据,则会进行发送中断处理函数。
3.串口查询函数
HAL_UART_GetState(): 判断UART的接收是否结束,或者发送数据是否忙碌
举例:
while(HAL_UART_GetState(&huart4) == HAL_UART_STATE_BUSY_TX) //检测UART发送结束
4.重定义printf函数(以串口UART1为例)
我们以USART接收与发送为例进行简单说明,首先我们需要重定向printf函数,在c语言中我们只要包含<stdio.h>的库就可以直接调用printf打印函数,但是对于单片机而言,即使包含了这个库,我们也不知道打印的输出方是谁,这时候我们就需要告诉单片机向电脑PC端打印数据,因此需要重写printf函数,将fputc和fgetc函数重写即可:
//重写fget和fput函数
#include <stdio.h>
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
五、在keil5配置代码
1.打开通过CubeMX创建的项目
2.测试重定向的printf函数
在mian函数中写入重定向的printf函数:
然后在while循环中测试:
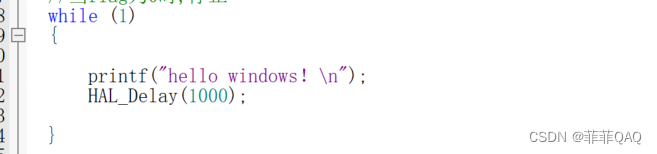
测试结果如图:
USAT1串口每隔1s打印输出一次“hello windows!”
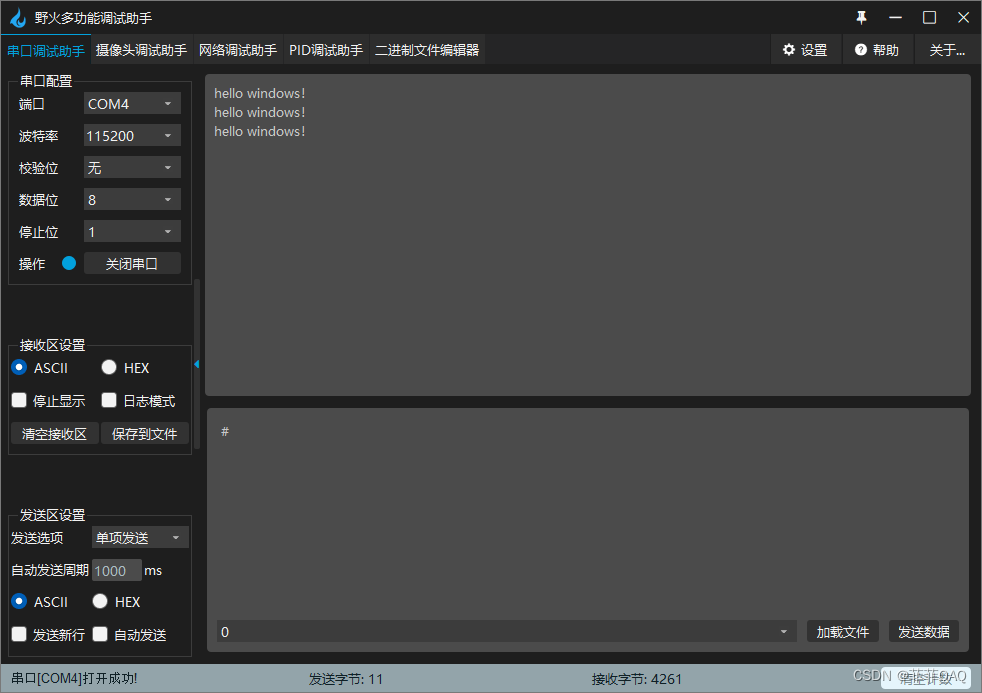
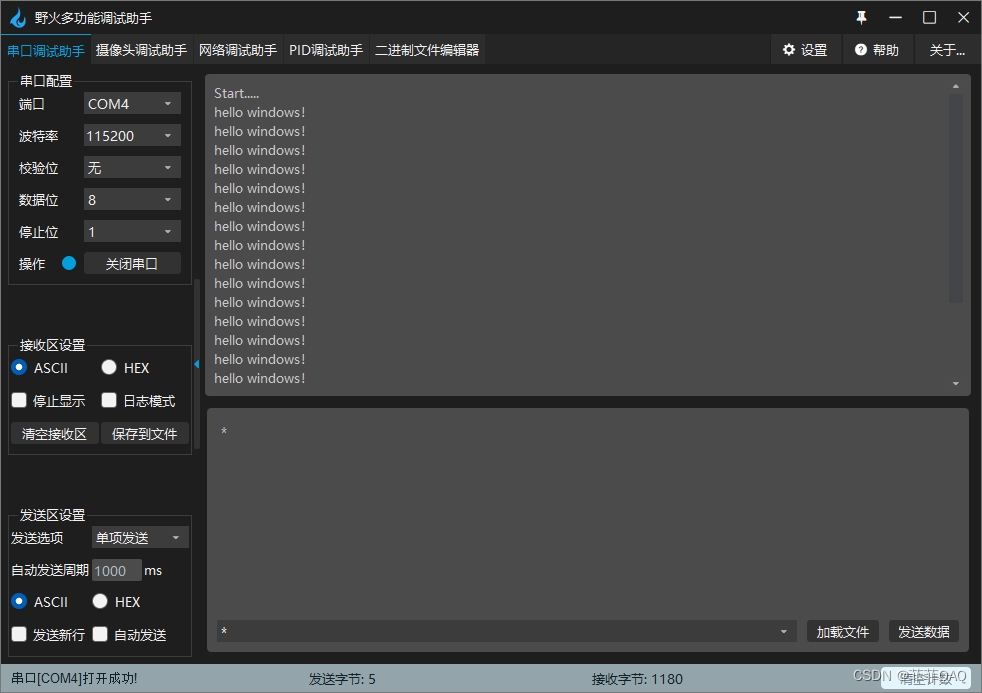
3.测试串口中断(发送"*“打印,发送”#"停止)
3.1 要求:
当上位机给stm32发送一个字符“#”后,stm32暂停发送“hello windows!”;发送一个字符“*”后,stm32继续发送;
3.2 思路:
首先,我们给STM32设置一个接收中断函数 HAL_UART_Receive_IT,该函数是为了接收上位机发送的指令 order,当上位机发送指令时,触发中断,STM32以中断方式接收到命令后,不会退出中断,而是会触发中断回滚函数HAL_UART_RxCpltCallback,而中断回滚函数函数体内部是由我们用户自定义的代码,因此我们可以在此根据指令的不同进行数据发送或者停止发送。
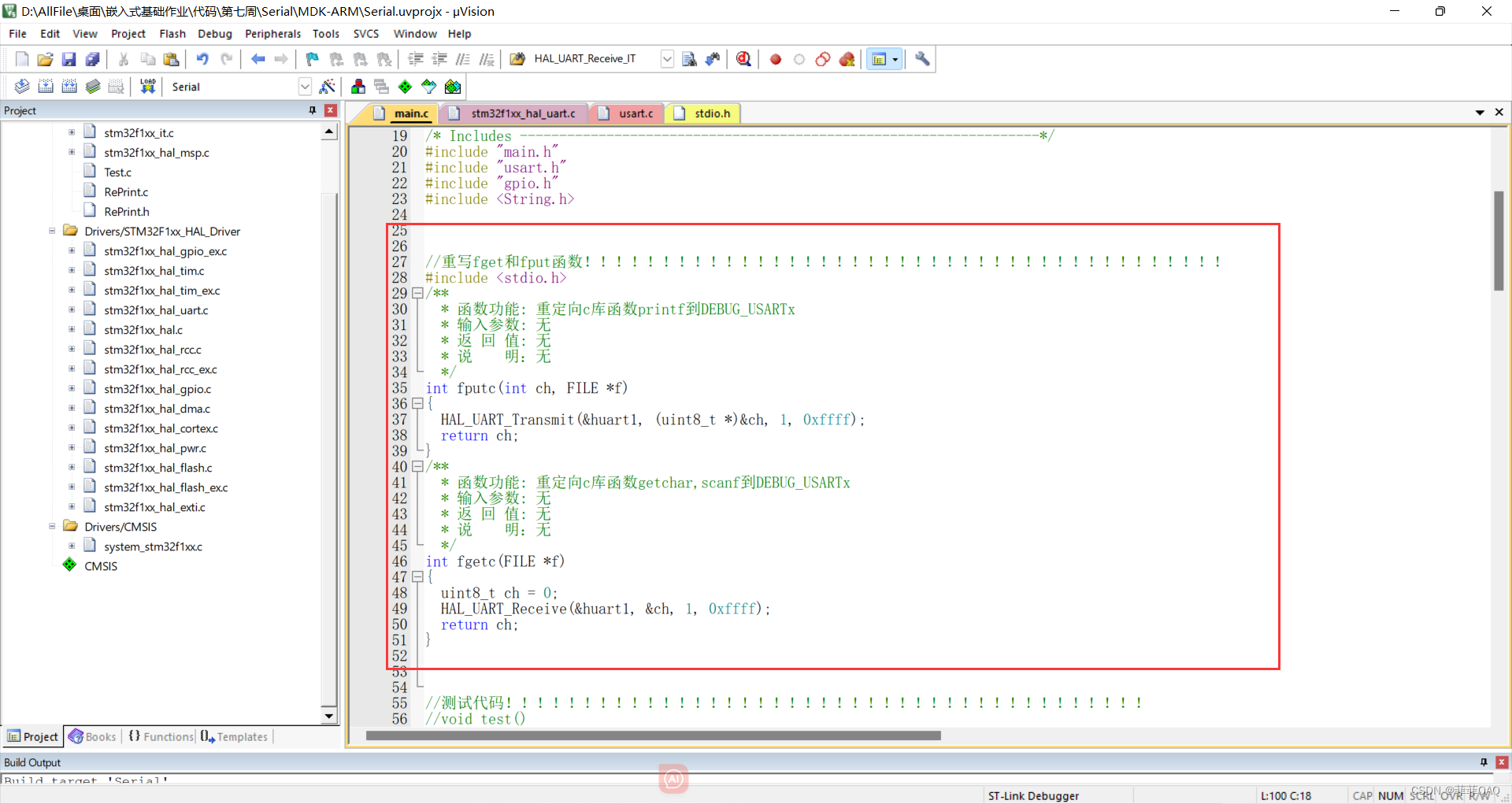
最终main函数内容如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
#include <String.h>
//重写fget和fput函数!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
#include <stdio.h>
/**
* 函数功能: 重定向c库函数printf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/**
* 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx
* 输入参数: 无
* 返 回 值: 无
* 说 明:无
*/
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart1, &ch, 1, 0xffff);
return ch;
}
char order;//指令 0:停止 1:开始
char message[]="hello windows!\n";//输出信息
char tips[]="CommandError\n";//提示1
char tips1[]="Start.....\n";//提示2
char tips2[]="Stop......\n";//提示3
int flag=0;//标志 0:停止发送 1.开始发送
void SystemClock_Config(void);
void test()
{
printf("helloworld");
HAL_Delay(1000);
}
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_USART1_UART_Init();
//设置接受中断
// 串口中断接收,以中断方式接收指定长度数据。大致过程是,设置数据存放位置,接收数据长度,
// 然后使能串口接收中断。接收到数据时,会触发串口中断。再然后,串口中断函数处理,直到接收到指定长度数据,
// 而后关闭中断,进入中断接收回调函数,不再触发接收中断。(只触发一次中断)
HAL_UART_Receive_IT(&huart1, (uint8_t *)&order, 1);
//当flag为1时,每秒发送一次信息
//当flag为0时,停止
while (1)
{
if(flag==1)
{
//发送信息
HAL_UART_Transmit(&huart1, (uint8_t *)&message,,strlen(message),0xFFFF);
//延时
HAL_Delay(1000);
}
// test();
}
}
//HAL库的接收中断进行完之后,并不会直接退出,而是会进入中断回调函数中,用户可以在其中设置代码,
//串口中断接收完成之后,会进入该函数,该函数为空函数,用户需自行修改
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
//当输入的指令为0时,发送提示并改变flag
if(order=='#'){
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips2, strlen(tips2),0xFFFF);
}
//当输入的指令为1时,发送提示并改变flag
else if(order=='*'){
flag=1;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips1, strlen(tips1),0xFFFF);
}
//当输入不存在指令时,发送提示并改变flag
else {
flag=0;
HAL_UART_Transmit(&huart1, (uint8_t *)&tips, strlen(tips),0xFFFF);
}
//重新设置中断
HAL_UART_Receive_IT(&huart1, (uint8_t *)&order, 1);
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
3.3 运行效果
电脑发送“*”,串口打印“hello windows!”
电脑发送“#”,串口停止发送“hello windows!”

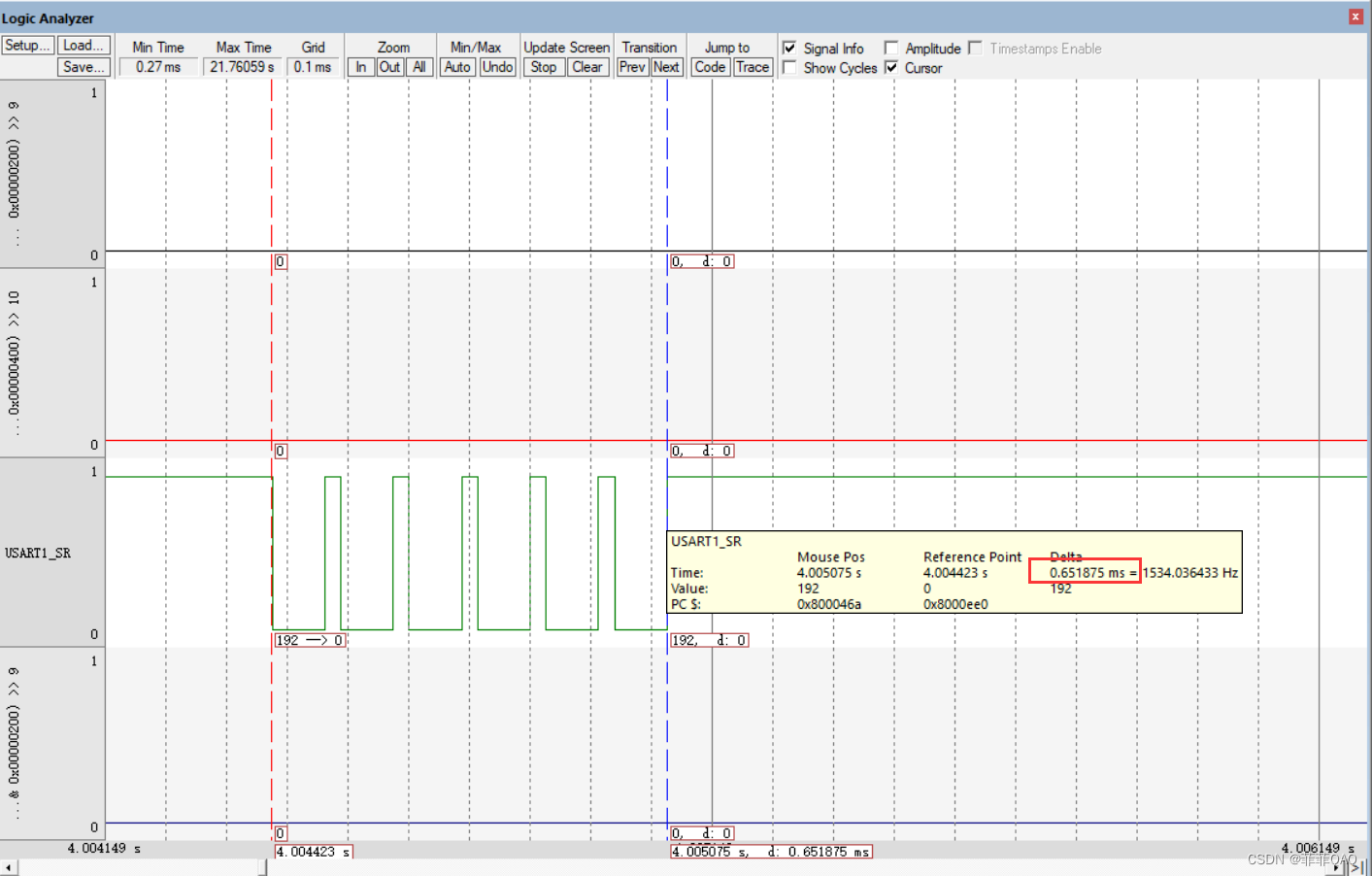
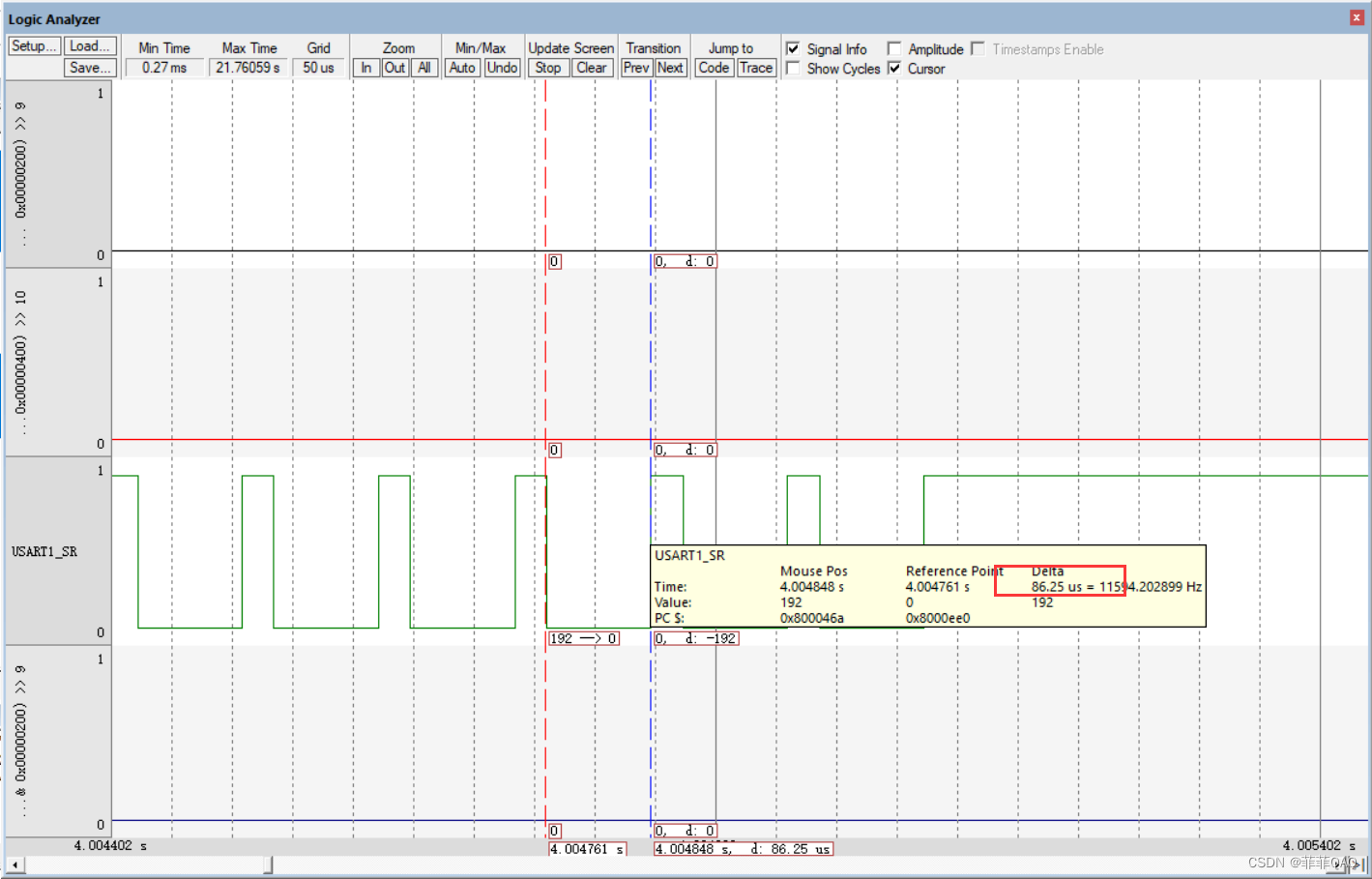
3.4使用Keil的软件仿真逻辑分析仪功能观察串口输出波形
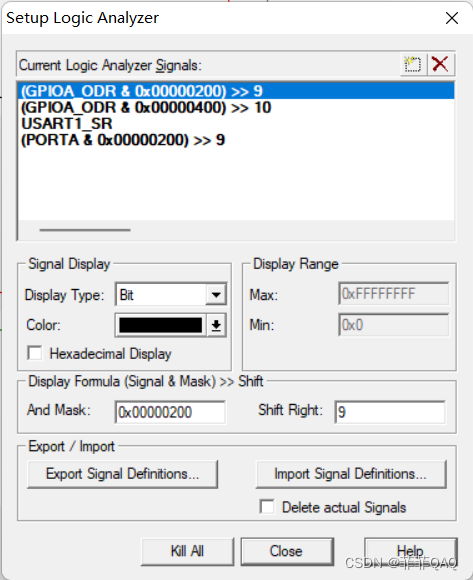
波形图,看出发送数据周期是1s左右:
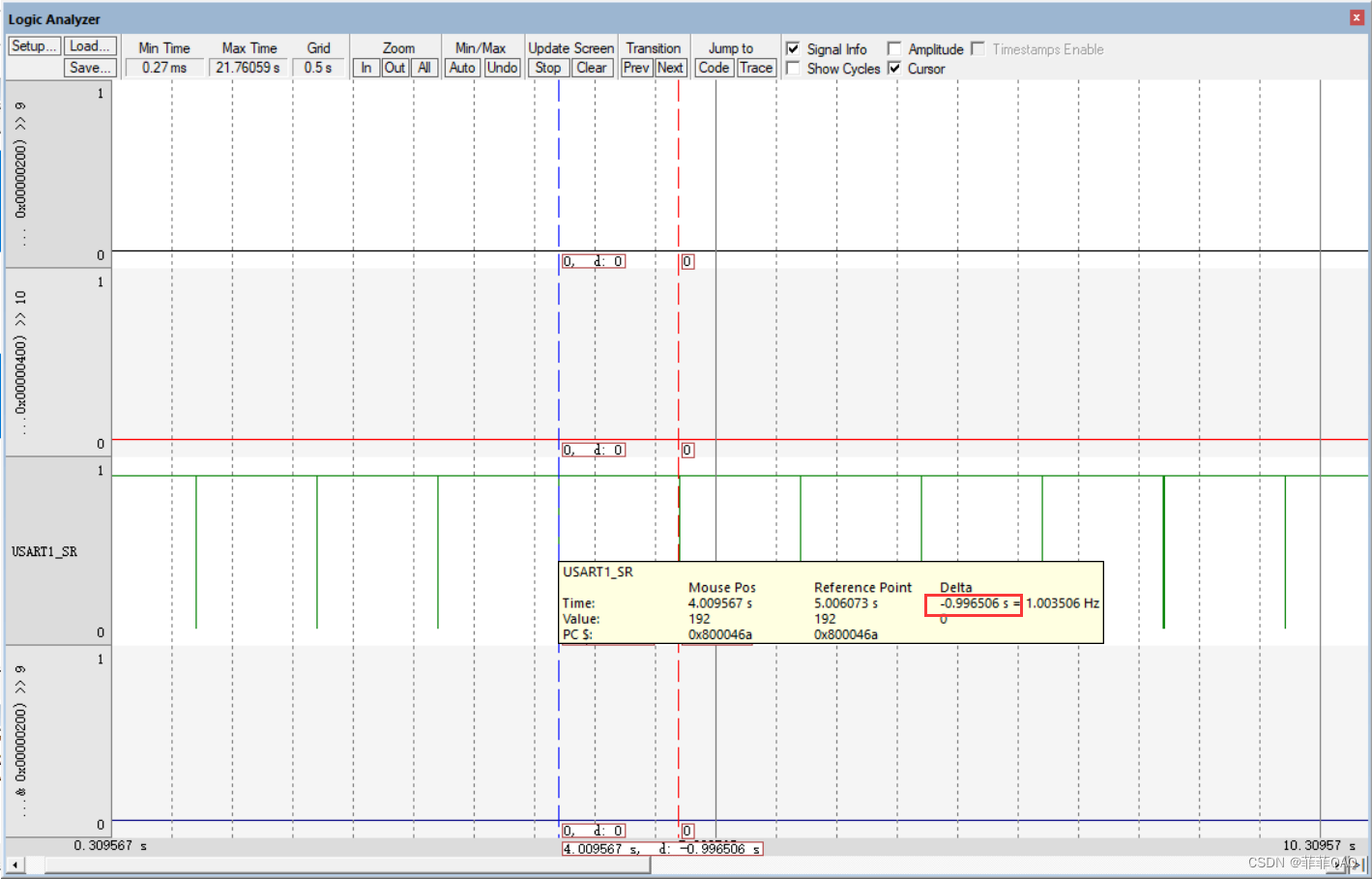
虚拟示波器看串口通信波形时,因为波特率很高,所以只能看到一个略粗的线条,要选中它,Ctrl+鼠标滚轮,zoom 不断放大,才能看见串口帧数据波形,这样才能测量出时间、波特率。
总结
RS232串口标准和TTL电平区别
RS232是一种异步串行通信标准,定义了通信设备之间信号的电平和格式。它使用了±12V的电平来表示二进制1和0,1表示-12V至-3V,0表示+3V~+12V。
而TTL电平标准采用0-5V电平范围,0V表示二进制0,3-5V表示二进制1。
由于微控制器芯片的IO口大多采用低电平为0,高电平为1的TTL标准,无法直接与RS232标准连接。因此需要通过"USB/TTL转232"模块进行电平转换。
CH340模块内部集成了CH340G芯片,可以完成USB与UART之间的转换。它将USB标准的±5V电平转换为RS232标准的±12V电平,或直接输出3.3V TTL标准电平,实现了USB与UART的连接。
STM32串口通信程序设计
1.安装STM32CubeMX软件,选择USART1作为串口通道,设置波特率为115200bps,停止位1位,无校验。生成初始化代码。
2.在Keil中打开stm32项目,添加HAL串口驱动头文件,实现串口发送和接收函数。
3.编写主函数,初始化串口,然后进入发送循环,每次发送"hello windows!"字符串。
4.同时开启串口接收中断,在中断服务程序中判断接收字符,如果为’#‘则暂停发送,如果为’*'则恢复发送。
5.编译下载到开发板,使用串口助手软件连接PC与开发板,测试串口通信功能是否正常。
总之,通过STM32CubeMX生成串口初始化代码,利用HAL库函数实现串口通信,并通过接收中断控制发送过程,实现了基于条件的串口数据发送。
参考
智能推荐
while循环&CPU占用率高问题深入分析与解决方案_main函数使用while(1)循环cpu占用99-程序员宅基地
文章浏览阅读3.8k次,点赞9次,收藏28次。直接上一个工作中碰到的问题,另外一个系统开启多线程调用我这边的接口,然后我这边会开启多线程批量查询第三方接口并且返回给调用方。使用的是两三年前别人遗留下来的方法,放到线上后发现确实是可以正常取到结果,但是一旦调用,CPU占用就直接100%(部署环境是win server服务器)。因此查看了下相关的老代码并使用JProfiler查看发现是在某个while循环的时候有问题。具体项目代码就不贴了,类似于下面这段代码。while(flag) {//your code;}这里的flag._main函数使用while(1)循环cpu占用99
【无标题】jetbrains idea shift f6不生效_idea shift +f6快捷键不生效-程序员宅基地
文章浏览阅读347次。idea shift f6 快捷键无效_idea shift +f6快捷键不生效
node.js学习笔记之Node中的核心模块_node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是-程序员宅基地
文章浏览阅读135次。Ecmacript 中没有DOM 和 BOM核心模块Node为JavaScript提供了很多服务器级别,这些API绝大多数都被包装到了一个具名和核心模块中了,例如文件操作的 fs 核心模块 ,http服务构建的http 模块 path 路径操作模块 os 操作系统信息模块// 用来获取机器信息的var os = require('os')// 用来操作路径的var path = require('path')// 获取当前机器的 CPU 信息console.log(os.cpus._node模块中有很多核心模块,以下不属于核心模块,使用时需下载的是
数学建模【SPSS 下载-安装、方差分析与回归分析的SPSS实现(软件概述、方差分析、回归分析)】_化工数学模型数据回归软件-程序员宅基地
文章浏览阅读10w+次,点赞435次,收藏3.4k次。SPSS 22 下载安装过程7.6 方差分析与回归分析的SPSS实现7.6.1 SPSS软件概述1 SPSS版本与安装2 SPSS界面3 SPSS特点4 SPSS数据7.6.2 SPSS与方差分析1 单因素方差分析2 双因素方差分析7.6.3 SPSS与回归分析SPSS回归分析过程牙膏价格问题的回归分析_化工数学模型数据回归软件
利用hutool实现邮件发送功能_hutool发送邮件-程序员宅基地
文章浏览阅读7.5k次。如何利用hutool工具包实现邮件发送功能呢?1、首先引入hutool依赖<dependency> <groupId>cn.hutool</groupId> <artifactId>hutool-all</artifactId> <version>5.7.19</version></dependency>2、编写邮件发送工具类package com.pc.c..._hutool发送邮件
docker安装elasticsearch,elasticsearch-head,kibana,ik分词器_docker安装kibana连接elasticsearch并且elasticsearch有密码-程序员宅基地
文章浏览阅读867次,点赞2次,收藏2次。docker安装elasticsearch,elasticsearch-head,kibana,ik分词器安装方式基本有两种,一种是pull的方式,一种是Dockerfile的方式,由于pull的方式pull下来后还需配置许多东西且不便于复用,个人比较喜欢使用Dockerfile的方式所有docker支持的镜像基本都在https://hub.docker.com/docker的官网上能找到合..._docker安装kibana连接elasticsearch并且elasticsearch有密码
随便推点
Python 攻克移动开发失败!_beeware-程序员宅基地
文章浏览阅读1.3w次,点赞57次,收藏92次。整理 | 郑丽媛出品 | CSDN(ID:CSDNnews)近年来,随着机器学习的兴起,有一门编程语言逐渐变得火热——Python。得益于其针对机器学习提供了大量开源框架和第三方模块,内置..._beeware
Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
文章浏览阅读7.9k次。//// ViewController.swift// Day_10_Timer//// Created by dongqiangfei on 2018/10/15.// Copyright 2018年 飞飞. All rights reserved.//import UIKitclass ViewController: UIViewController { ..._swift timer 暂停
元素三大等待-程序员宅基地
文章浏览阅读986次,点赞2次,收藏2次。1.硬性等待让当前线程暂停执行,应用场景:代码执行速度太快了,但是UI元素没有立马加载出来,造成两者不同步,这时候就可以让代码等待一下,再去执行找元素的动作线程休眠,强制等待 Thread.sleep(long mills)package com.example.demo;import org.junit.jupiter.api.Test;import org.openqa.selenium.By;import org.openqa.selenium.firefox.Firefox.._元素三大等待
Java软件工程师职位分析_java岗位分析-程序员宅基地
文章浏览阅读3k次,点赞4次,收藏14次。Java软件工程师职位分析_java岗位分析
Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
文章浏览阅读2k次。Java:Unreachable code的解决方法_java unreachable code
标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地
文章浏览阅读1w次。1、html中设置标签data-*的值 标题 11111 222222、点击获取当前标签的data-url的值$('dd').on('click', function() { var urlVal = $(this).data('ur_如何根据data-*属性获取对应的标签对象