OpenVINS代码解析-初探
标签: 算法
OpenVINS代码解析
标签: 算法
OpenVINS代码解析
OpenVINS 欢迎来到 OpenVINS 项目! OpenVINS 项目包含一些核心计算机视觉代码以及最先进的基于过滤器的视觉惯性估计器。 核心滤波器是一个,它将惯性信息与稀疏的视觉特征轨迹融合在一起。 利用滑动窗口公式融合...
有一段时间没有更新博客了,临近年关,有空来重新捡起来,这次我们来看看vio里面一个重要模块-初始化,OpenVINS根据相机的视差以及IMu的数据判断车辆运动状态,决定了两种初始化方式:静态初始化和动态初始化。...
OpenVINS: A Research Platform for Visual-Inertial Estimation Github 项目:https://github.com/rpng/open_vins 项目文件:https://docs.openvins.com 摘要 本文提出了一个开放平台OpenVINS,用于学术界和工业界...
openvins的编译是依赖opencv_contrib库的,需要重新下载编译安装opencv,opencv和opencv_contrib的版本要对应一致。 遇到问题的解决方法参考如下链接: https://blog.csdn.net/CSDN330/article/details/86747867 ...
本文介绍 openvins 中IMU仿真时基于控制轨迹和SPline插值,并计算IMU输出,的原理和代码。
这里面比较难看懂的就是姿态的误差状态传递,文档公式推导省略了很多公式特性,我在 github issue 里找到了一个更详细的。OpenVINS 文档链接:https://docs.openvins.com/propagation.html。
OpenVINS是黄国权老师团队的开源VISLAM,其基于MSCKF框架,加入了SLAM的局部地图提升前端VIO定位精度的思路值得大家学习。这里将陆续梳理和分享源代码的解读,因为时间有限难免有误,欢迎大家指正。 目录 0.class...
OpenVINS是一个项目,它包含一些核心计算机视觉代码和先进的基于过滤器的视觉惯性估计器。这个项目的核心滤波器将惯性信息与稀疏的视觉特征轨迹进行融合,使用滑动窗口公式进行融合操作。 在OpenVINS中,有一些关键...
####仅作为笔记 ubuntu16.04 安装ROS sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' sudo apt-key adv --keyserver 'hkp:/...
要安装OpenVINS(Visual-Inertial Odometry系统)在Ubuntu 20.04上,您可以按照以下步骤进行操作: 1. 首先,确保您的系统已连接到互联网并更新软件包列表。打开终端并运行以下命令: ``` sudo apt update ``` ...
OpenVINS 官方文档 第二部分
https://www.sohu.com/a/436535606_715754
OpenVINS读代码记录
open_vins的前端主要有三种方式:(1)光流KLT,描述子和Aruco跟踪。在MSCKF中默认使用的是光流跟踪。open_vins的前端可以参考ov_core中的test_tracking文件。 1.Feature类 class Feature { public: /// 特征点的ID...
Arm 源 https://blog.csdn.net/u010953692/article/details/77715865 Ros ...
openvins学习=记录
一.静止初始化 初始化是指在系统启动阶段,需要估计重力方向...OpenVINS系统中,只估计了重力方向、加速度计/陀螺仪biases。 初始化函数位于:ov_msckf/src/core/VioManager.cpp 中 Manager::try_to_initializ.

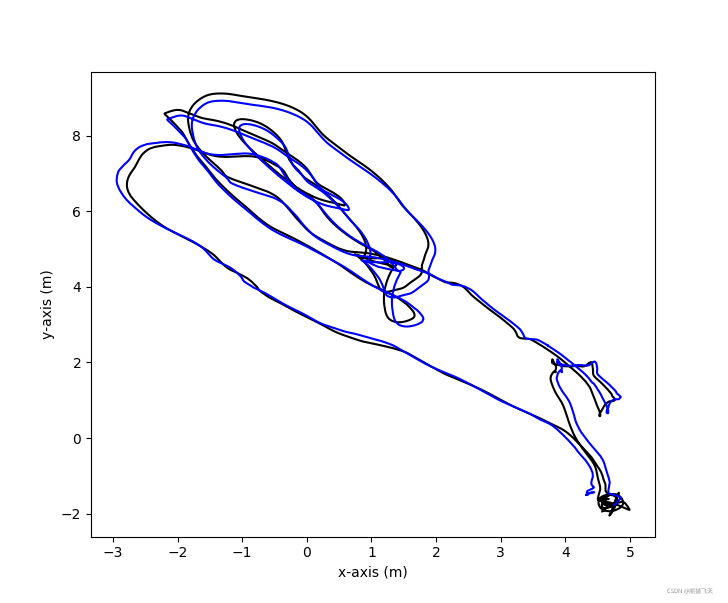
最近在复现openvins,但是得到的数据与真实的方向完全不一致,如上图,请问是哪里出问题呀
论文: OpenVINS A Research Platform for Visual-Inertial Estimation 论文摘要: 构建OpenVINS开源代码库,集成了多种trick (1)流形上滑动窗口卡尔曼滤波 (2)在线相机内外参标定 (3)相机到惯性传感器的时间偏移...
本文主要总结一下这几年工作中遇到过以及改进过相关VIO算法 1.背景介绍 一个完整的 SLAM(simultaneous localization and mapping) 框架包括传感器数据、 前端、 后端、 回环检测与建图,如图1所示,其中,前端将...
Open VINS是Huang Guoquan老师团队在2019年8月份开源的一套基于MSCKF的VINS算法。...详细文档:https://docs.openvins.com/ paper:http://udel.edu/~pgeneva/downloads/papers/c10.pdf 1.下载 mk...
矩阵的维度必须一致是数学中的一个基本概念,也被广泛应用于计算机科学中的各种算法和程序中。 在计算机视觉和机器人领域中,观一致性分析和FEJ(Fisher信息矩阵)是常见的方法。观一致性分析是一种用于估计相机...

为了学习,我这边从一个新Ubuntu18.04系统开始,单纯的环境来尝试open_vins。已经看了一遍MSCKF论文了,还有open-vins的论文。需要翻墙,/(ㄒoㄒ)/~~ 有没有可以翻墙的方法。等待安装成功,检测roscore、小海龟校验...
看到openvins引用新编译的opencv库,新的是3.2.0,默认是3.4.8,虽然我没替换3.4.8,制定了/usr/local/opencv320/,但是执行了make install。这种问题很简单了,直接打开cmake/OpenCVCompilerOptions.cmake:21 ,...
