”OpenVINS“ 的搜索结果
在catkin_ws文件夹下打开三个终端,分别启动vins_estimator,rviz和播放bag文件。刚新建的虚拟机不可以复制黏贴和拖拽文件,对虚拟机的使用造成很大不便,因此安装VMware Tools解决。→处理器(CPU)设置处理器数量2,...
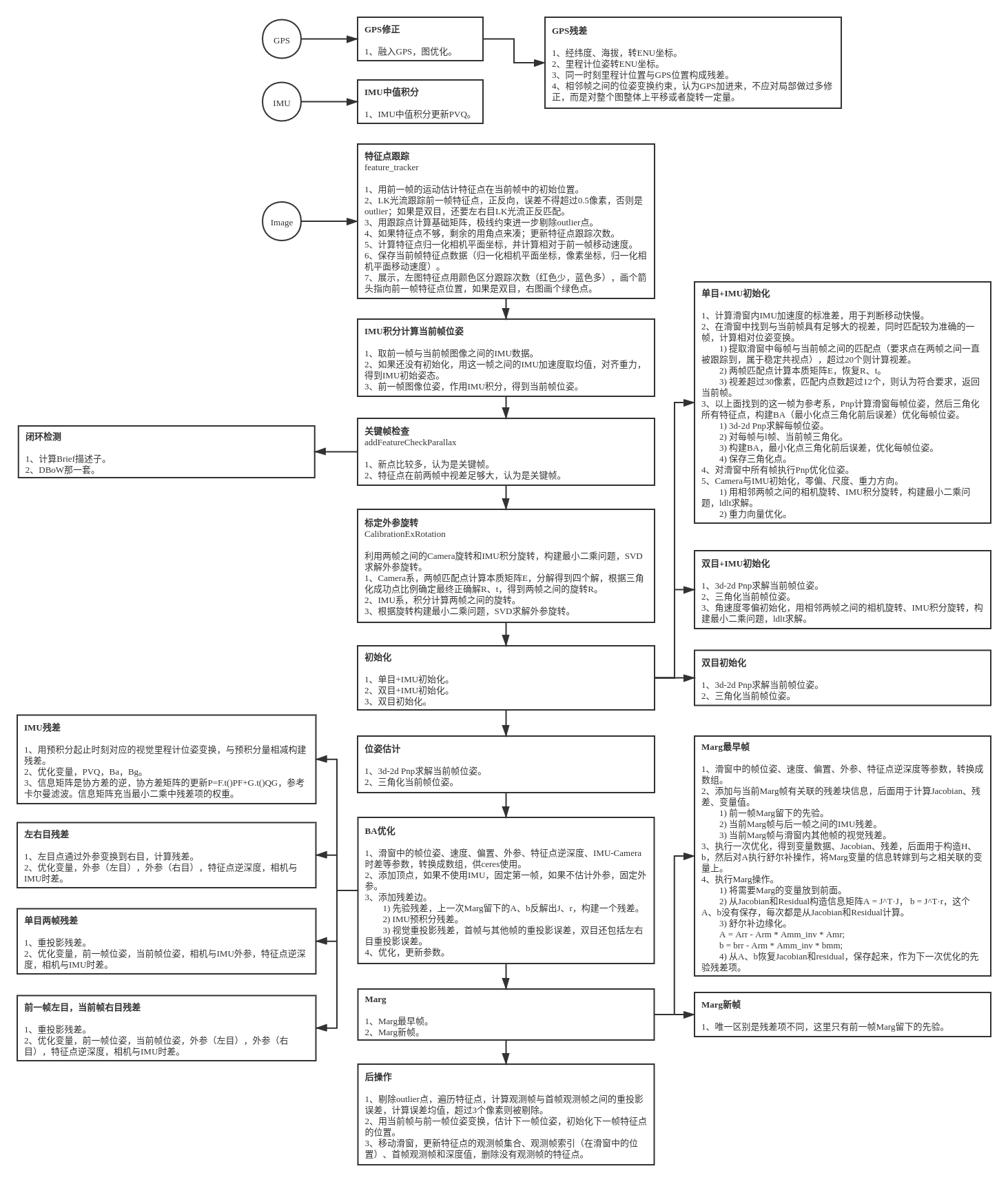
本文详细介绍vins-mono在初始化阶段完成的任务,以及如何使用ceres进行优化问题的求解。

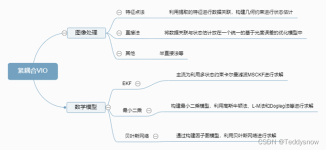
vins-mono+vins-fusiuon中的一些主要问题进行总结算法框架主要分为数据预处理、系统初始化、基于滑窗的VIO过程和回环检测等四个模块。在数据预处理模块主要包括图像直方图均衡、KLT特征点提取以及去畸变处理和光流...
VINS定义该坐标系和IMU坐标系相同。: 表示带噪声的测量结果,或者对一个确定量的估计值。重力方向和世界坐标系的z轴平行。: body坐标系到世界坐标系的旋转。: body坐标系到世界坐标系的平移。: 世界坐标系下的重力...

修改utility/visualization.cpp 158行的轨迹结果保存路径。修改utility/visualization.cpp 以下代码。创建m2dge.yaml。
目录ov_evalpose_to_fileformat_convertererror_comparisonerror_dataseterror_singlerunerror_simulationtiming_singleruntiming_comparisonplot_...open_vins/ov_eval 中评估工具的简单用法说明 阅读之...
Realsense D435i 安装并运行VINS-Mono 1.安装并编译vins-mono: https://blog.csdn.net/weixin_44580210/article/details/89789416 2.报错: (1)运行数据集正常,跑实景没有轨迹 解决方案: 查看是否有imu话题发布...
https://github.com/kuankuan-yue/VINS-FUSION-leanrning 1、Ceres Solver 安装依赖项 # CMake sudo apt-get install cmake # google-glog + gflags sudo apt-get install libgoogle-glog-dev libgflags-dev # BLAS...
VINS与GPS组合 距离上次写博客过去了快一年了,这一年来我一直忙于与SLAM方向几乎没有关系的科研工作,说来惭愧,最终也没研究出个啥。最近得空,就把我之前开源的代码整理了一下,把与GPS的组合部分调好,并且利用...


本文通过论文的翻译阅读旨在了解,针对特定的轮式平面移动机器人,有哪些额外的可以利用的约束,并通过数学方程体现在优化问题中。

花了点时间查找了launch文件参数的内容并做了标注。 我用的是单目普通摄像头,所以把第二个摄像头和鱼眼的参数给删掉了,希望对大家有帮助。 有问题也希望大家指正 <launch> <!-- MASTER NODE!...
组内大佬师兄今天抽出时间总结了一篇博客,主要内容是:把在阿木P450无人机上,对自带的NVIDIA Jetson Xavier NX边缘计算机部署VINS-fusion-GPU教程,并进行实验。
ubuntu20.04中python版本是3.x,因此对应的pip工具会变成pip3,可以先参考如下链接查看自己系统的python和pip版本。再调用如下命令对evo工具进行安装。

sudo apt-get install libsuitesparse-dev cd ~/catkin_ws/src git clone KumarRobotics/msckf_vio cd .. catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release roslaunch msckf_vio msckf_vio_e....
EVO工具测试VINS-mono轨迹误差1 修改VINS-mono轨迹保存代码1.1 修改 visualization.cpp1.2 修改 pose_graph.cpp1.3 修改VINS-mono运行参数2 运行EVO 1 修改VINS-mono轨迹保存代码 修改下列三个文件 vins_estimator/...
1.ROS安装 建议使用ROS官方网的步骤melodic/Installation/Ubuntu - ROS Wiki 一定要看清楚版本 ubuntu18 是 melodic 2.ceres安装 2.1依赖 ...sudo apt-get install cmake sudo apt-get install libgoogle-glog-dev...
首先关于ceres报错,大部分原因是ceres编译时用的c++14,vins代码用的c++11直接修改 相关的cmakelist.txt文件 # set(CMAKE_CXX_FLAGS "-std=c++14") set(CMAKE_CXX_FLAGS "-std=c++14") opencv相关修改: CV_FONT_...


一、安装ROS Kinetic 二、安装Opencv3.3.1 三、安装eigen3.3.7 四、安装ceres1.14 五、安装VINS
ubuntu下,Vins-Fusion运行kitti,euroc和tum数据集并使用evo评估
本文介绍两种方式的环境搭建,分别是 1. 安装包安装方式 2. 源码安装方式
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地