最近在根据vins代码进行改写,实验发现 当opencv为3.4.12版本时(coreimgprocimgcodecs这几个库),vins 优化结果会非常飘。如果vins结果比较离谱,可以检查下opencv的版本。 用ros跑的话,如果ros不是源码编译或者...
”OpenVINS“ 的搜索结果





D435i相机运行VINS-MONO参数修改
ros1code_utilsimu_utilsKalibrvins fusion(能够运行)
Open Fan sudo gedit /sys/devices/pwm-fan/target_pwm 150 Eigen sudo apt-get remove libeigen3-dev cd ~/Downloads/ wget -O eigen.zip ...
VINS-Mono运行记录1.VINS-Mono在数据集下运行自己做的其它测试2.单目+IMU自己采集数据运行记录自己做的其它测试 1.VINS-Mono在数据集下运行 选取的数据集是EuRoC下的MH_05_difficult.bag。 1.打开终端1,直接运行: ...
出现错误libopencv_imgcodecs.so.3.2, needed by /opt/ros/melodic/lib/libcv_bridge.so, may conflict with libopencv_imgcodecs.so.3.4,原因为cv_bridge 使用系统默认的版本apt 安装的3.2.0。...

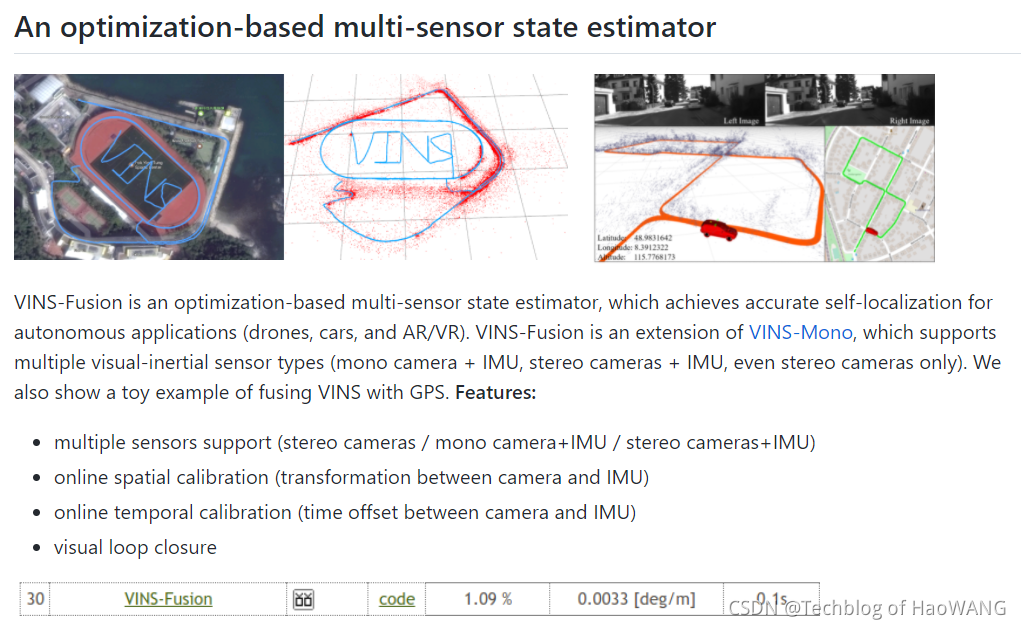
说明:把资料放在这里,主要是因为github经常上不去,速度慢。...VINS MONO 运行介绍 VINS mono的下载地址 https://github.com/HKUST-Aerial-Robotics/VINS-Mono 安装参考网址 ROS Documentation


系统:Ubuntu 20.04。相机:手机自带摄像机。
最近_SLAM_Research_2021 ------------ ICRA 2021 ------------ ICRA 2021终端线---------- ...1. [融合] 2021-01-14-使用GPS和OpenStreetMap在智能手机上对车辆进行Visual-IMU状态估计 2. [Math] 2

What is **observability** ? > In control theory, observability is a measure for how well internal states of a system can be inferred by knowledge of its external outputs. What is **consistency** ?...
前提:VINS-Mono 已经可以正常运行数据集 1.安装SDK 官方文档 除OpenCV以外主要安装另外两个包protobuf和MNN,依赖库装好后,选择官方链接中的Ros Wrapper安装继续,完成即可 2.在VINS-Mono中添加配置文件 config...
1 MSCKF-VIO 介绍: MSCKF_vio是一种基于多状态约束卡尔曼滤波器的双目视觉里程计。 github:https://github.com/KumarRobotics/msckf_vio 运行rviz //download mkdir msckf/src cd msckf/src ...


在 NVIDIA jetson tx2 上基于 realsense d435i 相机运行 vins 相关配置一、tx2刷机二、安装librealsense,realsense驱动1.安装依赖库2.从debian repository安装三、安装 Ros-melodic四、安装 librealsense-ros五、...
推荐文章
- Python Django 版本对应表以及Mysql对应版本_django版本和mysql对应关系-程序员宅基地
- Maven的pom.xml文件结构之基本配置packaging和多模块聚合结构_pom <packaging>-程序员宅基地
- Composer 原理(二) -- 小丑_composer repositories-程序员宅基地
- W5500+F4官网TCPClient代码出现IP读取有问题,乱码问题_w5500 ping 网络助手 乱码 send(sock_tcps,tcp_server_buff,-程序员宅基地
- Python 攻克移动开发失败!_beeware-程序员宅基地
- Swift4.0_Timer 的基本使用_swift timer 暂停-程序员宅基地
- 元素三大等待-程序员宅基地
- Java软件工程师职位分析_java岗位分析-程序员宅基地
- Java:Unreachable code的解决方法_java unreachable code-程序员宅基地
- 标签data-*自定义属性值和根据data属性值查找对应标签_如何根据data-*属性获取对应的标签对象-程序员宅基地