
”PID“ 的搜索结果
这个是非常好用的模糊PID温度控制算法,已经在自己的项目中使用,你只需要按照自己的控制对象修改误差变化率最大值和误差阈值即可。
通俗简单地讲解给直流减速编码电机加pid速度环控制。
2.3 STM32电机PID速度控制 之前的文章,完成了直流减速电机的PWM控制、电机测速。本篇文章,将实现电机的速度闭环控制。 在公众号:小白学移动机器人,发送:速度PID,即可获得本篇文章的STM32工程文件以及相关资料...



一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制) PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。这里我们从原来上来...
从零开始系列之PID控制,宗旨就是以说人话的方式讲述它,真正的做到从零开始,小白一看就会,一学就废。
这一章我分享一下现在我使用的PID算法代码(代码是大疆工程师写的PID代码模板,写的非常棒),结合原理分析,让大家对其有一个更加深刻的理解,并且知道如何写PID算法
一个模糊PID温度控制算法源代码 (亲测可用)


智能车运动控制详细介绍:普通PID、串级PID、改进PID——适用于四轮车、差速车(三轮车、平衡车)

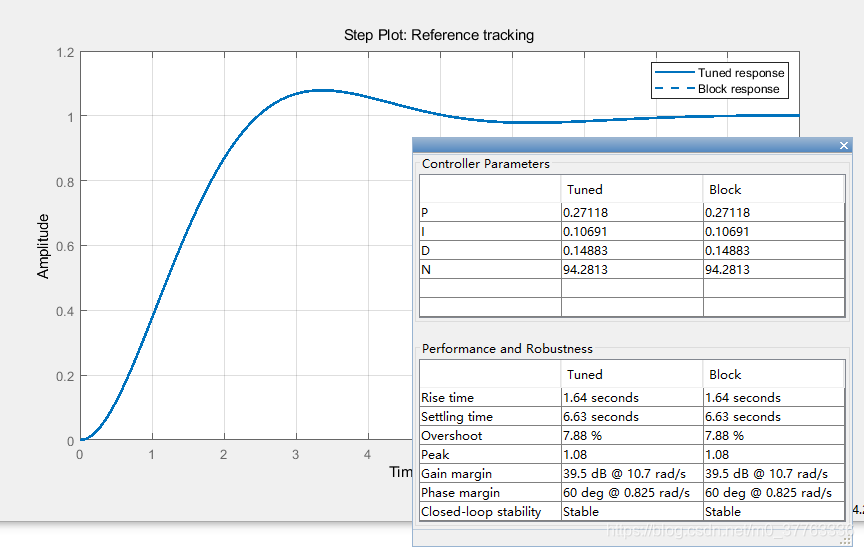
关于杨艺的那篇《基于S函数的BP神经网络PID控制器及simulink仿真》,我自己在Matlab2016b搭建出来的SIMULINK模型,亲测可用

串级pid控制电机。
PID特点总结 1. 比例控制(P) 定义:具有比例控制规律的控制器称为 PPP 控制器。控制器输出 y(t)y(t)y(t) 和偏差信号 e(t)e(t)e(t) 成比例关系 定义式:y(t)=Kpe(t)y(t)=K_pe(t)y(t)=Kpe(t),其中比例系数 Kp=1PK...
看前需知:作者本人使用的是四个普通的TT电机加编码器+增量式PID,适合PID初学者,但是需要对PID和增量式PID有一定的认知,本篇未有详细介绍,以代码应用为主,大佬勿喷。 文章目录一、粗谈PID?二、使用的硬件设备...
STM32 PID控温源码内有增量算法和位置PID算法
模糊自适应整定PID控制
标签: pid



PID 算法是闭环控制系统中常用的算法,PID 分别是 Proportion(比例)、Integral(积分)、Differential(微分)的首字母缩写。它是一种结合比例、积分和微分三个环节于一体的闭环控。
openmv识别红色物体并返回坐标给stm32单片机,通过pid控制舵机云台
文章目录前言PID原理简单介绍位置型PID增量式PID位置型PID——C语言增量型PID——C语言积分分离的PID控制算法——C语言抗积分饱和的PID控制算法——C语言变积分的PID控制算法——C语言 前言 PID算法在工业应用中...
完成波形分析后,仅需将得到的峰峰值和周期带到PID前辈们推导出的公式中,计算得到相应的PID参数,再将PID参数更新投入使用,PID自整定便大功告成!③分析波形:分析以上过程产生的波形的特征,根据需要计算出相应的...
推荐文章
- 小说网站系统源码|PHP付费小说网站源码带app-程序员宅基地
- Swift编码规范_swift 正则判断文件类型-程序员宅基地
- 关于shell 中return用法解释(转)_shell return-程序员宅基地
- Linux编译宏BUILD_BUG_ON_ZERO-程序员宅基地
- c51语言单片机打铃系统设计,基于单片机的自动打铃系统的设计-程序员宅基地
- 在php中使用SMTP通过密抄批量发送邮件-程序员宅基地
- python数据清洗+数据可视化_python课程题目数据清除与可视化-程序员宅基地
- 【11g】3.3 Oracle自动存储管理存储配置_oraclestorageoptions-程序员宅基地
- signature=b2f9171fa2897cefe08a669efaf58433,FULFILLMENT TRACKING IN ASSET-DRIVEN WORKFLOW MODELING-程序员宅基地
- 宜兴市计算机中等学校,重磅!江苏省陶都中等专业学校正式揭牌!-程序员宅基地