
”VISLAM“ 的搜索结果
A Novel Feedback Mechanism-Based Stereo Visual-Inertial SLAM1....总之,反馈机制使VIO/VISLAM系统的前端和后端能够相互促进,从而提高VIO/VISLAM系统的效率和准确性。 对VISLAM系统采用紧耦合方法,因此,还
很棒的SLAM 精选的SLAM资源列表随时了解最新消息上次更新时间:2021年3月14日。 该回购协议由维护。 该仓库主要总结了GitHub上与SLAM / VO相关的很棒的存储库,包括PC端,移动端的存储库和一些对学习者友好的教程。...
7 ORBslam3高召回率的位置识别算法:很快执行闭环,要检测是真的闭环,不是真的闭环闭环了会把图拉错(最慢一帧闭环,最快三针闭环)闭环+地图合并 2 只有活跃地图,而3多了非活跃地图(跟丢了存起来),跑过相同...
(转载请注明出处) 这一篇打算分析一下一般情况下,针对多源传感器融合的的非线性最小二乘优化,其增量方程的结构。 假设描述利用M个传感器信息进行融合的优化问题如下:\[ \tag{1} \label{1} ...
,,,和包虎* PRCV 2019,LNCS 11859,第283–295页,2019年。如何使用对于编译: 安装依赖项:Eigen,Ceres Solver和OpenCV。 克隆存储库。 使用mkdir -p build && cd build && cmake -DCMAKE_BUILD_TYPE=Release ...
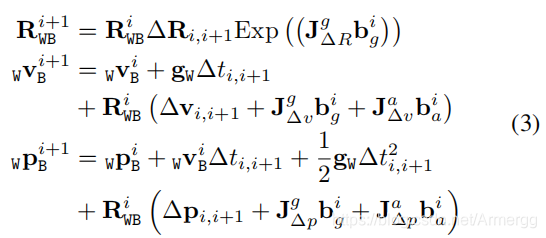
下面来讨论使用IMU预积分框架的VIO/VISLAM,在进行优化求解时,其增量方程的结构。 不失一般性,我们不区分相机状态和IMU状态(暂时不考虑优化IMU-CAM外参。可以认为预积分是将IMU数据进行坐标转换后在相机系下进行...
(转载请注明出处) 这几篇笔记打算对Bundle Adjustment问题的数学描述进行深入探讨。主要是对利用非线性最小二乘(Gauss-Newton法和Levenberg-Marquardt法等)对该问题进行迭代求解时,其增量方程的形式进行剖析,...
图像数据的采集时间和记录时间之间的延迟 一方面,图像数据的采集要比IMU数据的采集花费更多时间,直观体现为曝光时间是一个时段,而不是一个瞬时 另一方面,图像数据带宽远高于IMU数据,这就在传输方面产生另外的...
大多数现有的基于视觉的SLAM系统及其变体仍然假设观测是绝对静态的,无法在动态环境中表现良好。在这里,我们介绍了 Dynam-SLAM (Dynam),这是一种双目视觉惯性 SLAM 系统,能够在高动态环境中实现稳健、准确和连续...
Vuforia Engine SDK已使用诸如图像目标,...以下是包含通过Vuforia Fusion启用的推荐设备的列表,这些设备可以通过支持各自平台提供的设备跟踪技术ARKit / ARCore来支持,也可以通过Vuforia进行校准以支持VISLAM。...

点云PCL免费知识星球,点云论文速读。 标题:Survey and evaluation of monocular visual-inertial SLAM algorithms for augmented reality 作者:Jinyu LI, Bangbang YANG, Danpeng CHEN, Nan WANG, Guofeng ZHANG1...
微信小程序3D,使用Three.js在微信小程序中展示gltf模型,使用VisionKit展示AR能力
使用微信自带的VisionKitAPI提供 AR 能力。官方手册地址:虽然官方提供了demo代码,但是埋藏的暗坑还是不少。特此总结一下。

VPS-SLAM: Visual Planar Semantic SLAM for Aerial Robotic Systems ABSTRACT:室内环境中存在大量的高级语义信息,这些信息可以为机器人提供更好的环境理解,从而提高其估计误差的不确定性。...

文章目录1. 前言2. 舒尔补 (Schur complement) 的应用:边界概率,条件概率 1. 前言 本博客主要介绍了VINS-Mono中边缘化的相关知识,由于VINS-Mono中只是提及了边缘化的策略并没有提及边缘化信息传递的原理,因此本...
初稿。。。。。。。。。。...Visual SLAM 自 PTAM 算法以来,框架基本趋于固定。通常包括 3 个线程,前端 tracking 线程、后端 mapping 优化线程、闭环检测(loop closure)线程。...(核心:特征点描述子 SURF SIFT...
VISLAM的ROS实现 snap_vio包装了机器视觉库中的mvVISLAM,提供了ROS接口。 依存关系 (作为子模块) 建造 对于骁龙/高通飞行,请使用标准catkin_make。 对于QFlight Pro,请使用以下说明:。 运行! snap_vio需要做...


《增强现实:原理、算法与应用》读书笔记(10)视觉惯性SLAM 单目视觉SLAM系统存在一定的局限性,它非常依赖相机的成像质量,在图像质量不佳的时候则难以正常工作。即使图像质量很好,缺乏尺度信息也对重建造成了...
前言:1. 本文简单将各种方案分为以下 7 类(固然有不少文章无法恰当分类,比如动态语义稠密建图的 VISLAM +_+):一、Geometric SLAM二、
ORB-SLAM3~原理
标签: 人工智能
第三步是视觉IMU联合后验估计,ORB-SLAM3只需要2秒就可以完成尺度的初始化,误差在5%左右,此外,ORB-SLAM3还将进行只包含尺度因子和重力方向的优化,10秒一次,用于避免传感器运动缓慢时IMU激励不够的情况。...
8. ViSLAM:https://github.com/HKUST-Aerial-Robotics/VINS-Mono 9. Dense-VO:https://github.com/taketwo/dense-vo 10. SURF-SLAM:https://github.com/taketwo/surf-slam 这些模型都是使用深度学习技术来进行 ...
推荐文章
- confluence搭建部署_ata confluence-程序员宅基地
- SpringCloud与SpringBoot版本对应关系_springboot 2.1.1 对于的cloud-程序员宅基地
- 如何恢复硬盘数据?简单解决问题_磁盘恢复 csdn-程序员宅基地
- 苹果手机测试网络速度的软件,App Store 上的“网速测试大师-测网速首选”-程序员宅基地
- 教了一年少儿编程,说说感想和体验-程序员宅基地
- 22东华大学计算机专硕854考研上岸实录-程序员宅基地
- 如何用《玉树芝兰》入门数据科学?-程序员宅基地
- macOS使用brew包管理器_brew清理缓存-程序员宅基地
- 【echarts没有刷新】用按钮切换echarts图表的时候,该消失的图表还在,加个key属性就解决了_echarts 怎么加key值-程序员宅基地
- 常用机器学习的模型和算法_常见机器学习模型算法整理和对应超参数表格整理-程序员宅基地