pixhawk是由3DR联合APM小组与PX4小组于2014年推出的飞控PX4的升级版,它同时拥有PX4和APM两套固件和相应的地面站软件。该飞控是目前全世界飞控产品中硬件规格最高的产品。1、Spektrum DSM receiver(Spektrum DSM信号...
”pixhawk“ 的搜索结果

总结开源飞控pixhawk的各种代码解读,总体框架结构的运行思路,各模块详细设计步骤
pixhawk6c端口定义
标签: pixhawk
pixhawk6c端口定义
pixhawk FMU/IO板BootLoader固件
进入到通道显示界面时,发现只有6个通道,拨动遥控器上的摇杆和开关发现,前四路通道对应的是左右两个摇杆的四个方向,通道5和6对应的是VrA和VrB两个旋钮。SERVO9_FUNCTION的值改为55 (AUXOUT 1对应SERVO9,55表示...
pixhawk上有多个串口,我使用telem 2 与树莓派通讯,为了避免 RTT too high for timesync的告警(波特率太低),需要设置串口固定波特率为921600。power口接电流计,电流计接电源单独供电(我使用pixhawk的usb口与...
pixhawk6x飞控端口定义
NOKOV度量动作捕捉系统可以很好的适配PX4无人机飞控平台。进行数据通信的时候,使用SDK或者VRPN的方式都是可以的。本文演示NOKOV度量动作捕捉系统通过VRPN与PX4平台进行数据传输的方法。
pixhawk2.4.6 pixhawk2.4.8官方原理图PCB 如果需要二层板AD版本的, 可去电路城搜索下载 www.cirmall. com/circuit/21579/ 嘉立创五元就可以自己打板回来测试 需要自己烧写BootLoader px4 pixhawk2.4.6 2.4.8 px4...
飞控(Pixhawk 4 Mini)与机载电脑(Jetson Xavier NX )实现串口通信
Pixhawk2.4.8飞控安装APM固件教程
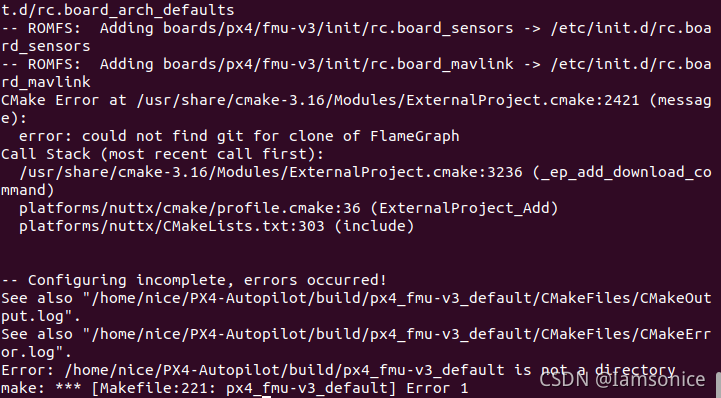
探索 Pixhawk 标准:无人机控制与导航的未来 项目地址:https://gitcode.com/pixhawk/Pixhawk-Standards 在现代科技的前沿,无人机已经成为了一个不可或缺的工具和研究领域,而 Pixhawk Standards 则是这个领域的...
选择下载好的固件上传到飞控,也是一样的。
Pixhawk 的bootloader文件,共四个文件px4fmuv2_bl.bin,px4fmuv2_bl.elf,px4io_bl.bin,px4io_bl.elf
树莓派4B与Pixhawk4飞控之状态监控读取飞控配置树莓派配置程序代码总结 先看看装备,上节就说了,这树莓派的壳子我喜欢 历经九九八十一难,终于把树莓派和Pixhawk4飞控接通了,中间尝试了多种方法,四处碰壁,期间...
在测试新功能或逻辑之前,务必进行充分的地面测试和安全飞行测试,确保飞行器的稳定性和 安全性。- 在QGroundControl中,你可以配置飞行器的参数、校准传感器、创建航线任务等。- 将自定义固件烧录到你的飞控中,并...
ubuntu18(依赖python2和pip,建议直接ubuntu18不用最新的)
PixHawk下载与编译Bootloader文件.pdf
PixHawk+2+接口定义 (1).pdf
您可以从官方网站或可靠的第三方来源下载Pixhawk驱动安装文件,如px4_driver_installer_v10_win.exe。下载完成后,双击安装文件,按照步骤进行安装。在安装过程中,您可以选择默认的安装目录,通常为C:\px4_drivers...
检测是否设置好,可将遥控器关闭,观察第 3 通道油门值是否在975 以下,飞行模式是否自动切换到 RTL。关闭遥控器后,飞行模式页面,绿色高亮显示会自动跳到RTL(返航)模式。注意:如果通道里没有绿色显示,说明接收...
开源飞控之王--PIXHAWK教程V0.4.10.pdf
PIXHAWK2.4.8飞控原理图
自制Pixhawk飞控板烧写BootLoader教程-附件资源
推荐文章
- 51单片机的存储结构_51单片机哈佛结构-程序员宅基地
- 2021年NOC大赛编程马拉松赛道图形化小低组模拟卷,包含答案_2021年noc编程马拉松 真题-程序员宅基地
- 云原生|kubernetes|centos7下离线化部署kubesphere-3.3.2---基于kubernetes-1.22.16(从网络插件开始记录)_离线部署kubesphere-程序员宅基地
- 基于 vue3+ts 的父组件改变多个子组件的值 和 调用不同子组件的方法_vue3 父组件修改子组件的值-程序员宅基地
- App投放增长你应该知道的【渠道数据归因】_谷歌投商店app 推广 归因-程序员宅基地
- 一个golang 的开源图数据库 dgraph,支持集群部署,可以扩展,比数据库性能强,安装简单。使用标准HTTP接口,支持java,go,pythonSDK。_go dgraph-程序员宅基地
- JavaScript 键盘事件_js ctrl + z 会让键盘事件失效-程序员宅基地
- 聊聊 DES 算法_如何理解des加脱密具有相同结构-程序员宅基地
- informix数据同步到mysql_Informix数据库常用操作命令-程序员宅基地
- ‘malloc’在此作用域中尚未声明_c二维数组静态 malloc不在作用域-程序员宅基地