【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍 【视觉SLAM十四讲学习笔记】第二讲——初识SLAM 【视觉SLAM十四讲学习笔记】第三讲——旋转矩阵Eigen是一个C++开源线性代数库。它提供了快速的有关矩阵的线性代数运算...
”《视觉SLAM十四讲》笔记“ 的搜索结果

视觉SLAM十四讲第11讲11.1 理论部分11.2 实践部分 第11讲 11.1 理论部分 回环检测,虽然说和视觉里程计有些联系,但一般还是比较独立的。 1)回环检测 回环检测一般用于消除累积误差,构建全局一致的轨迹和地图,也...
初步对视觉SLAM的认识
视觉SLAM十四讲第十二讲笔记
标签: slam
视觉SLAM十四讲第十二讲笔记 这一讲关注回环检测。 我们知道SLAM主体(前端、后端)主要的目的在于估计相机的运动,而回环检测模块,是用于构建全局一致的轨迹和地图。举个例子: 因为前端给出相邻帧之间的估计,很难...
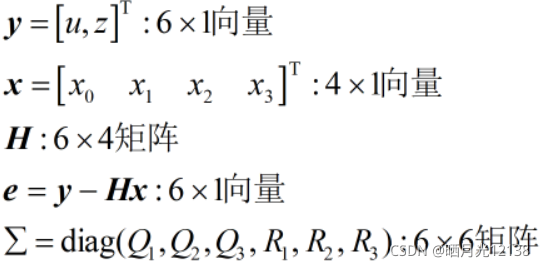

第六章非线性优化学习任务6.1 状态估计问题6.2 非线性最小二乘最速下降法确定增量(只保留一阶)牛顿法(保留二阶)G-N和L-M(详细解释看书)小结 ...至于观测方程,第五讲已经说明了它的内容,即针孔相机模



安装VTK视觉模块 进入管网下载,选好对应到版本,选择8.2或者7.1,太新的版本可能需要安装更高版本到cmake,所以建议安装8.2或者7.1.1,我自己安装到8.2,下载地址 VTK 下载完解压进入目录,编译 cmake .. make sudo ...
视觉slam十四讲 学习笔记-4
标签: slam

最近这个专栏比较少时间去写了,科研任务逐渐收紧,后面等过年放假有时间再整理,抱歉!
可参考博客:视觉SLAM十四讲:回环检测-知识点+代码 11.2 实践部分 11.2.1 11.2.2 调试bug 安装下载 DBoW3库 在进行编译程序前,先需要安装DBoW,第二版的安装文件下载链接如下所示: DBow3 下载完成后,安装方法很...
SLAM: Simultaneous Localization and Mapping 同时定位与地图构建(建图)。搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环地的模型。...【高翔】视觉SLAM十四讲_哔哩哔哩_bilibili。
1)学习视频:【高翔】视觉SLAM十四讲。 视觉SLAM十四讲第6讲6.1 理论部分6.2 实践部分 第6讲 6.1 理论部分 本讲主要是状态估计的问题,大佬以非线性优化为主,也是现在视觉SLAM主流的方向。 1)状态估计 前面我们...

1、传感 前端VO 后端优化 回环 建图 2、单目 双目 深度 ...8、SLAM本质:对运动主体自身和周围环境空间不确定性的估计Spatial Uncertainty 9、回环 识别曾到达过的场景 图像相似性 10、建图 度量地图
相机与图像,opencv 基本操作,PCL 点云操作

1)学习视频:【高翔】视觉SLAM十四讲。 视觉SLAM十四讲第7讲7.1 理论部分7.2 实践部分 第7讲 7.1 理论部分 7-8讲均是视觉里程计的内容,主要区别在于前端原理不同,分别对应特征点法和直接法。 1) 前面我们得到...

《高翔视觉slam十四讲》学习环境配置和实例代码报错解决。
【视觉slam十四讲实战】
标签: SLAM


2.1举例 具有自主运动能力的机器人需要什么技术支撑? 首先它得会动,其次,“自主”,必须需要它...视觉SLAM主要分为单目,双目以及深度(RGB-D)三种相机,但基本原理和单目均相似。 单目相机:成本低,但由于单目无
执行pcl_viewer map.pcd不成功(运行程序总说找不到pcd文件),把pcd文件和你的可执行文件放一起试试...

视觉Slam十四讲读书笔记 文章目录视觉Slam十四讲读书笔记@[toc]2 初识SLAM2.4 编程基础2.4.2 hello slam2.4.3 cmake编译2.4.4 使用库2.3 SLAM问题的数学表达3 三维空间刚体运动3.1 旋转矩阵3.3 旋转向量和欧拉角...
推荐文章
- 大数据技术未来发展前景及趋势分析_大数据技术的发展方向-程序员宅基地
- Abaqus学习-初识Abaqus(悬臂梁)_abaqus悬臂梁-程序员宅基地
- 数据预处理--数据格式csv、arff等之间的转换_csv转arff文件-程序员宅基地
- c语言发送网络请求,如何使用C+发出HTTP请求?-程序员宅基地
- ccc计算机比赛如何报名,整理:加拿大的CCC是什么,怎么报名?-程序员宅基地
- RK3568 学习笔记 : ubuntu 20.04 下 Linux-SDK 镜像烧写_rk3568刷linux-程序员宅基地
- Gradle是什么_gradle是干嘛的-程序员宅基地
- adb命令集锦-程序员宅基地
- 【Java基础学习打卡15】分隔符、标识符与关键字_java分隔符有哪三种-程序员宅基地
- Python批量改变图片名字_python批量修改图片名称-程序员宅基地