
”《视觉SLAM十四讲》笔记“ 的搜索结果
没讲啥,讲了个针孔相机模型,相机内外参矩阵,还有空间点投影到相机成像平面的过程。
抽象

读书笔记:非线性优化 ...于是,我们已经弄清了经典SLAM 模型在视觉情况下的具体表达。 然而,由于噪声的存在,运动方程和观测方程的等式必定不是精确成立的。尽管相机可以非常好地符合针孔模型,但...
在SLAM中,要估计一个相机的位置和姿态,该位姿是由SO(3)上的旋转矩阵或SE(3)上的变换矩阵描述的。设某个时刻机器人的位姿为。最后,我们给出SE(3)上的扰动模型,而直接李代数上的求导就不再介绍了。我们把最后的...
每个李群都有与之对应的李代数。李代数描述了李群单位元附近的正切空间,它描述了李群局部的导数。可以理解为:李代数对应了李群的导数。一般的李代数定义如下:李代数由一个集合V、一个数域F和一个二元运算[,]组成...
第一讲初识SLAM 一、Linux的熟悉 1.如何在 Ubuntu 中安装软件(命令⾏界⾯)?它们通常被安装在什么地⽅? 1)apt-get 方式的安装; 普通安装:sudo apt-get install XXX 修复安装:sudo apt-get -f install ...

学习笔记,仅供学习,不做商用,如有侵权,联系我删除即可当前部分:Chapter 1: 预备知识。
旋转矩阵用9个量描述3自由度的旋转,具有冗余性;欧拉角和旋转向量是紧凑的,但具有奇异性。事实上,我们找不到不带奇异性的三维向量描述方式。类似于用两个坐标表示地球表面(如经度和纬度),必定存在奇异性(纬度...


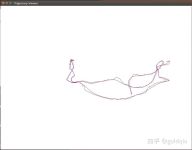
【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍 【视觉SLAM十四讲学习笔记】第二讲——初识SLAM 【视觉SLAM十四讲学习笔记】第三讲——旋转矩阵 【视觉SLAM十四讲学习笔记】第三讲——Eigen库矩阵表示方式至少有一下...
首先介绍了向量及其坐标表示,并介绍了向量间的运算;然后,坐标系之间的运动由欧氏变换描述,它由平移和旋转组成。旋转可以由旋转矩阵 SO(3) 描述,而平移直接由一个。
视觉SLAM十四讲-第八讲笔记
标签: SLAM
SLAM中的视觉里程计分为两部分,一是特征点法,先提取特征点,把特征点看做三维空间中的不动点,根据特征点匹配关系进行位姿和深度估计,通过最小化重投影误差优化相机运动;二是不使用特征点,根据图像灰度直接估计...
读书笔记:SLAM:现在与未来 终于到本书最后一章了。也到了此系列博客的最后一篇! 我们前面的内容介绍了一个SLAM 系统中的各个模块的工作原理,这是研究者们多年的工作的结晶。目前,除了这些理论框架之外,我们也...
SLAM的目的是解决“定位”和“地图构建”这两个问题——一边要估计传感器自身的位置,一边要建立周围环境的模型。对此,我们需要借助传感器,让它以一定形式观察外部世界来解决这个问题。当用相机作为传感器时,需要...
一方面需要明白自身的(即位置),另一方面也要了解外在的(即地图)。这个时候就需要借助传感器了。
三维空间的刚体运动描述方式
--------------------------------------------------ch8--------------------------------------------------------- 在ch8中的使用LK光流提取FAST角点,有代码错误,应该修改如下; 第一处错误 ...
1)学习视频:【高翔】视觉SLAM十四讲。 视觉SLAM十四讲第8讲8.1 理论部分8.2 实践部分 第8讲 8.1 理论部分 7-8讲均是视觉里程计的内容,主要区别在于前端原理不同,分别对应特征点法和直接法。 此外计算相机的运动...
视觉SLAM十四讲学习笔记-第一讲_goldqiu的博客-程序员宅基地 视觉SLAM十四讲学习笔记-第二讲-初识SLAM_goldqiu的博客-程序员宅基地 视觉SLAM十四讲学习笔记-第二讲-开发环境搭建_goldqiu的博客-程序员宅基地 视觉SLAM十四讲...
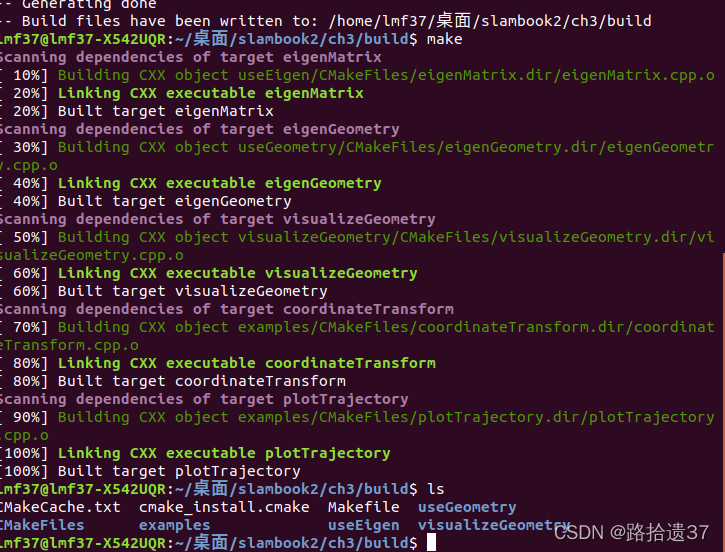
Eigen_Geometry 使用、Pangolin安装

上文提到考虑全局的后端优化计算量非常大,因此在计算增量方程时,借助H矩阵的稀疏性加速运算。但是随着时间的推移,累积的相机位姿和路标数量还是会导致计算量过大,以上一节的示例代码数据为例:16张图像,共提取...
高翔十四讲学习环境配置与报错解决
视觉SLAM十四讲学习笔记-第一讲_goldqiu的博客-程序员宅基地 视觉SLAM十四讲学习笔记-第二讲-初识SLAM_goldqiu的博客-程序员宅基地 视觉SLAM十四讲学习笔记-第二讲-开发环境搭建_goldqiu的博客-程序员宅基地 视觉SLAM十四讲...
推荐文章
- linux c 串口 调用命令,Linux系统C语言串口收发-程序员宅基地
- 八:通过Infura部署到rinkeby测试网_使用infura运行测试网-程序员宅基地
- 『Android 技能篇』优雅的转场动画之 Transition-程序员宅基地
- Webshell绕过技巧分析之-base64编码和压缩编码-程序员宅基地
- 大一计算机思维知识点,大学计算机—基于计算思维知识点详解.docx-程序员宅基地
- 关于敏捷开发的一篇访谈录-程序员宅基地
- 挑战安卓和iOS!刚刚,华为官宣鸿蒙手机版,P40搭载演示曝光!高管现场表态:我们准备好了...-程序员宅基地
- 精选了20个Python实战项目(附源码),拿走就用!-程序员宅基地
- android在线图标生成工具,图标在线生成工具Android Asset Studio的使用-程序员宅基地
- android 无限轮播的广告位_轮播广告位-程序员宅基地