”姿态解算“ 的搜索结果
姿态解算-陀螺仪+欧拉法
采用Mahony算法对IMU(+三轴磁力计)输出进行姿态解算,注释完整清晰。
会参考已有较多的博客、b站视频、学术论文,主要给大家罗列一个学习清单,节省时间,快速入门姿态解算算法。由于本人电控专业,后续一些解释会与其结合,只谈自己的理解,希望大家多包涵。先来说明一下,我们要知道...


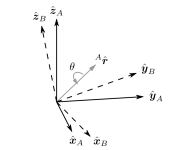
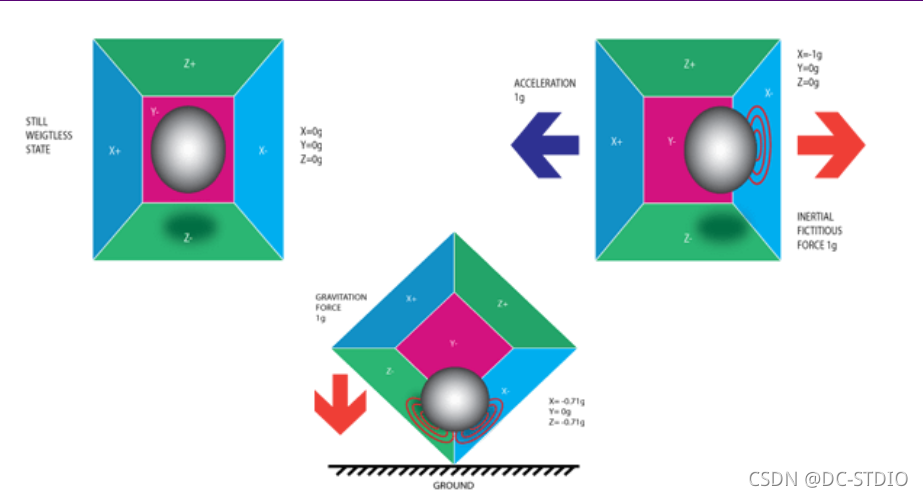
姿态解算也叫做姿态分析,姿态估计,姿态融合。姿态解算是根据IMU(惯性测量单元)数据(陀螺仪、加速度计、罗盘等)求解出飞行器的空中姿态,所以也叫做IMU数据融合。 ** 一、姿态解算常用名词解释 ** 1.坐标系 导航...
http://www.crazepony.com/wiki/attitude-algorithm.html
MPU6050是我们常用的六轴空间位置处理芯片,次文档使用卡尔曼滤波的方式使数据更加的准确
四元数AHRS姿态解算和IMU姿态解算分析
MPU6050传感器的六轴姿态解算算法代码
STM32解算MPU6050工程文件,IIC读取6050数据,带DMP 。
MPU6050陀螺仪与姿态解算实验,使用hawk2平台
惯性导航姿态解算,附带程序详解,内容完全可以直接使用
基于stm32f103c8t6的姿态解算源码,icm和imu系列均可稳定使用
Arduino uno + mpu6050 陀螺仪 运用卡尔曼滤波姿态解算源代码(总共4套程序)全部编译通过没有问题
九轴传感器姿态解算方法(MATLAB)
扩展卡尔曼滤波 进行姿态解算的matlab代码,含九轴原始数据、方向传感器数据,可直接运行
MPU6500读取与卡尔曼滤波,mpu6050卡尔曼滤波姿态解算,C,C++源码.zip
四元数是简单的超复数。 复数是由实数加上虚数单位 i 组成,其中i^2 = -1。 相似地,四元数都是由实数加上三个虚数单位 i、j、k 组成,而且它们有如下的关系: i^2 = j^2 = k^2 = -1, i^0 = j^0 = k^0 = 1 , 每个...
stm32f1对mpu6050和9250的姿态解算,采用DMP直接解算成角度,亲测可用,不动的情况下角度基本保持不变
MEMS 传感器 -陀螺仪加速度计在姿态解算建模 阅读原文:...
实现IMU数据的拓展卡尔曼滤波,可以解算人体姿态,得到欧拉角等数据
MPU6050数据处理方法,文档,手册,提供四轴的理论基础
九轴传感器姿态解算方法(互补滤波和梯度下降法MATLAB)九轴传感器姿态解算方法(互补滤波和梯度下降法MATLAB)九轴传感器姿态解算方法(互补滤波和梯度下降法MATLAB)九轴传感器姿态解算方法(互补滤波和梯度下降法...
整合了9轴传感器:3轴加速度、3轴陀螺、3轴磁力计数据来解算姿态,参照了一些开源代码,这是我国奖代码,请放心使用
首先根据地磁定向平台功能需求,实现了微处理器模块、惯性测量单元模块、地磁传感器模块、温度传感器模块、数据存储模块和数据传输模块的硬件电路设计。该定向平台实现了低功耗、小面积和高可靠的技术需求,具有利于...
入门阶段必看,基本都有注释,包括速度更新,姿态更新,位置更新
九轴姿态解算源代码 C语言
标签: 姿态解算
九轴姿态解算源代码,C语言版,可用,包括加速度,磁场,陀螺仪融合
推荐文章
- 【解决报错】java.sql.SQLException: Access denied for user 'root'@'localhost' (using password: YES)-程序员宅基地
- echart y轴显示小数或整数_echarts y轴显示16位小数-程序员宅基地
- Android客户端和Internet的交互_android与internet-程序员宅基地
- linux新建分区步骤_linux创建基本分区的步骤-程序员宅基地
- 信号处理-小波变换4-DWT离散小波变换概念及离散小波变换实现滤波_dwt离散小波变换进行滤波-程序员宅基地
- Ubuntu 10.10中成功安装ns-allinone-2.34_进入/home/ubuntu1/ns-allinone-2.34目录cd /home/ubuntu1-程序员宅基地
- 使用AES算法对字符串进行加解密_java 判断aes加密 与否-程序员宅基地
- DFS深度优先搜索(前序、中序、后序遍历)非递归标准模板_深度优先搜索 无递归-程序员宅基地
- 程序员面试字节跳动,被怼了~_字节跳动java什么技术站-程序员宅基地
- 嵌入式软考备考(五)安全性基础知识-程序员宅基地