”张正友标定“ 的搜索结果


【立体视觉(三)】之张正友标定法原理——立体视觉学习笔记。
张正友相机标定(全流程,含畸变,matlab源代码解析)
我们的真实世界是三维的,拍摄的图片是二维的,相机起到的就是映射的过程,可以把相机看成一个广义的函数,输入的三位场景,输出是二维的图片(灰度图),一般情况下我们看到的是彩色图,彩色图是RGB三通道,每个...
求解摄像机的内、外参数。
张正友标定工具箱,matlab,用于摄像头内参的标定
用于相机内参标定的棋盘格文件,张正友棋盘格。 A4大小,pdf格式,可直接打印使用 --size 8x6 --square 0.024m
A Flexible New Technique for Camera Calibration. 中文不包括实验结果及其结论
张正友标定法英文原版论文
标签: 张正友标定
张正友标定法英文原版论文,简易实用的平板标定的开山之作。
用matlab做的标定界面,包括角点检测与张正友标定算法做的小软件
相机标定PPT ,内容包含标定目的,四种坐标的转换、张正友标定法、单应性矩阵的求解、相机内参外参的求解,畸变矫正等。适用于学习单目双目视觉的研究者了解相机测距和三维建模等的原理。
1、内容:calibration_0.py是使用张正友标定法对棋盘图片标定的python程序,import内是测试使用的棋盘图片,export是程序运行完保存标定棋盘的文件夹。 2、学习目标:了解张正友标定法的过程及实现,可以对摄像机...
我们主要对张正友标定法的原理进行介绍,文章后面后面也会给大家介绍一个张正友标定的matlab包,它以及具体使用的视频。张正友标定是基于2D平面靶标的相机标定,实验中对平面棋盘格进行多角度拍摄后,将所得图片输入...

张正友标定法 论文 相机标定
标签: 相机标定
张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文 张正友标定法论文
张正友标定matlab源代码,里面有大量数据,可以为自己写标定代码提供参考。 张正友标定matlab源代码,里面有大量数据,可以为自己写标定代码提供参考。
比如点的位置偏差几个像素,甚至出现特征点对误匹配的现象,如果只使用4个点对来计算单应矩阵,那会出现...包括利用最优化算法的标定方法,利用摄像机变换矩阵的标定方法、进一步考虑畸变补偿的两步法、张正友标定法。

张正友标定方法
标签: 张正友 标定 opencv
张正友标定法的opencv实现最完整过程,从标定到评判,经测试,效果很好


张正友标定法--从原理到实战
标签: 相机标定
张正友标定处于什么水平,为啥提到相机标定,就不得不提他张博士的方法? 简单介绍一下张博士 他的方法优缺点,有没有替代方案? 他的方法输入输出是啥?利用工具包实现流程如何? 他的方法如何推导优化? 哪些因素...
张正友标定算法的详细推导和C++实现,效果与opencv对比内参和重投影误差差别在0.01以内,效果极佳。
张正友标定法是一种求解相机内外参的标定方法。相比使用三维标定板的标定方法,张正友标定法使用二维平面标定板,优点是标定板制作成本低,应用更为灵活,但缺点是需要拍摄多张不同姿态的标定板图像(PS:也可以在...
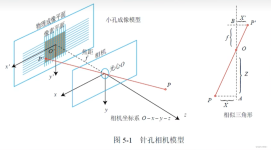
张正友标定法利用如下图所示的棋盘格标定板,在得到一张标定板的图像之后,可以利用相应的图像检测算法得到每一个角点的像素坐标 (u,v)。张正友标定法将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0,...
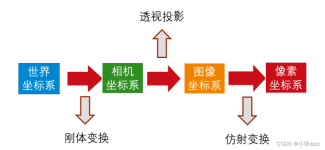
相机标定是指确定相机的内部参数和外部参数的过程。内部参数包括相机的焦距、像素尺寸、主点位置等;外部参数包括相机的位置、朝向等。通过相机标定,可以将像素坐标与实际物理坐标建立对应关系,从而实现机器视觉...
推荐文章
- javafx预览PDF_javafx pdf-程序员宅基地
- ipv4与ipv6访问_纯ipv4访问纯ipv6-程序员宅基地
- css强制换行-程序员宅基地
- 链霉亲和素修饰的CdSe–ZnS量子点-程序员宅基地
- 饿了么4年 + 阿里2年:研发路上的一些总结与思考-程序员宅基地
- vue的sync语法糖的使用(组件父子传值)_sync传值-程序员宅基地
- 最大流最小割_网络最大流量与割的容量的关系-程序员宅基地
- queryString模块_querystring模块安装-程序员宅基地
- 安卓电量检测工具Battery Historian的使用记录_battery-historian 电量测试-程序员宅基地
- 基于QPSK的载波同步和定时同步性能仿真,包括Costas环的gardner环_qpsk符号同步-程序员宅基地