本征矩阵E:它包含了物理空间中两个摄像机相关的旋转(R)和平移信息(T)。T和R描述了一台摄像机相对于另外一台摄像机在全局坐标系中的相对位置。 基础矩阵F:除了包含E的信息外,还包含了两个摄像机的内参数。由于F...
”本征矩阵“ 的搜索结果
11单文件头,可以简单地将本征矩阵与mxArray结构相互转换。 概述 MexEig中有两个功能: template EigenToMxArray(mxArray * dst, const Matrix & src) template MxArrayToEigen(Matrix & dst, const mxArray * src...
里面有直接采用c++一步一步计算orb特征的过程,可以帮助理解如何计算orb特征,还有slam中如何将计算得到的本征矩阵分解为旋转矩阵和平移向量。
本征矩阵——相机坐标系的关系&基础矩阵——图像像素坐标系的关系(加入内参) 链接:https://blog.csdn.net/ssw_1990/article/details/53355572 本征矩阵$$E包含物理空间中两个摄像机相关的旋转和平移信息,...
原文:http://blog.csdn.net/xiaoyinload/article/details/49000855 本征矩阵E:它包含了物理空间中两个摄像机相关的旋转(R)和平移信息(T)。T和R描述了...
matlab lanczos算法用来计算大型稀疏矩阵的最大最小本征值及相应的本征矢量

原文:http://blog.csdn.net/xiaoyinload/article/details/49000855本征矩阵E:它包含了物理空间中两个摄像机相关的旋转(R)和平移信息(T)。T和R描述了一台摄像机相对于另外一台摄像机在全局坐标系中的相对位置。基础...
本征矩阵E 本征矩阵E :描述相机之间的位姿关系; 定义:矩阵E包含在物理空间中两个摄像机相关的旋转和平移信息; opencv 求本征矩阵函数原型如下: Mat findEssentialMat( InputArray points1, InputArray ...


在这里用的opencv是440版本的,接下来就是相应的代码,基于八点法来求取基础矩阵。 #include<opencv2/opencv.hpp> #include<iostream> #include<vector> using namespace std; using namespace ...
立体视觉如何计算本征矩阵E和基础矩阵F@TOC 欢迎使用Markdown编辑器 你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Markdown的...
原文:http://blog.csdn.net/xiaoyinload/article/details/49000855本征矩阵E:它包含了物理空间中两个摄像机相关的旋转(R)和平移信息(T)。T和R描述了一台摄像机相对于另外一台摄像机在全局坐标系中的相对位置。基础...
I found that Eigen's Matrix is default column-major, which is like MATLAB, but how do I initialize an Eigen::MatrixXd from an cv::Mat? The following code is my test. But none of them could be compiled...
一、单目相机 1、单应性矩阵 在计算机视觉中,平面的单应性被定义为一个平面到另外一个平面的投影映射。因此一个二维平面上的点映射到摄像机成像仪上的映射就是平面单...其中矩阵K通常被称为内在矩阵,它由相机本身
图片来自《学习opencv》
证明:令,其中,是非零向量构造的反对称矩阵,是正交矩阵,进行如下推导: ,将其展开验证可知该矩阵的秩为2。 ,根据同济大学版线性代数第五章定理7得0特征值为单根。 因为A可以相似对角化,所以必须有3个线性...

将本征矩阵转换为C数组本征库可以将现有内存映射到本征矩阵。float array[3];Map(array, 3).fill(10);int data[4] = 1, 2, 3, 4;Matrix2i mat2x2(data);MatrixXi mat2x2 = Map(data);MatrixXi mat2x2 = Map(data, 2,...
理论重述 1. 概述 本文明确使用单目视觉, 针孔相机模型[1], orb特征检测与匹配[2] 相关理论: 对极几何, 三角测量, PnP 2. 对极几何 2.1 坐标系 像素坐标系: 图像的左上角是原点, 正方向分别往右和往下 ...
https://blog.csdn.net/kokerf/article/details/72191054
里面有直接采用c++一步一步计算orb特征的过程,可以帮助理解如何计算orb特征,还有slam中如何将计算得到的本征矩阵分解为旋转矩阵和平移向量。 相关下载链接://download.csdn.net/download/zcc8008208820/10533416?...
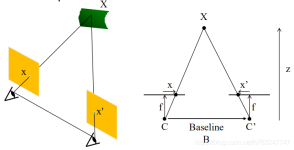
三角测量 假设已有一套无畸变、对准、已测量好的完美标准立体实验台,如下图: 两台摄像机的图像平面彼此完全共面,具有完全平行的光轴(光轴是从投影中心O出发,通过主点c的一条射线,又称为“主光线”),它们是...
对变形镜驱动器影响函数耦合矩阵进行正交化获得了按照空间频率划分的变形镜本征模式,建立了采用变形镜本征模式进行波前重构的数值模型,对基于该波前重构方法的自适应光学系统校正大气热晕进行了数值模拟。...
SVD分解是一种将矩阵分解为三个矩阵的乘积的方法,它的形式为 E = UΣV^T,其中U和V是正交矩阵,Σ是对角矩阵。如果行列式为负,则将对应的旋转矩阵取反。因为在计算机视觉中,我们通常希望旋转矩阵具有正的行列式,...
比较两个单目图像,经过特征匹配找到对应的特征点后,可以通过对极几何找到对应特征点间的几何关系(2D-2D)。 注意点: ① 此处只有两个坐标系,即左右摄像机决定的两个相机坐标系,以左相机坐标系为基准,当...
推荐文章
- Java基础 高频面试题,2024年最新java多并发面试题-程序员宅基地
- vue视频播放插件vue-video-player的具体使用方法-程序员宅基地
- Element-UI 项目中 Pagination 分页如何使用 ???_element ui中pagination分页怎么用-程序员宅基地
- unity3dButton组件详细用法_unity button怎么用-程序员宅基地
- 安全***需要掌握的东西-程序员宅基地
- linux gs pdf,linux – 什么是汇编中的%gs-程序员宅基地
- 模拟退火算法matlab代码实现-程序员宅基地
- jQuery 语法实例_jquery-syntax示例-程序员宅基地
- Anaconda 安装与TensorFlow安装_error: pytest-astropy 0.8.0 requires pytest-cov>=2-程序员宅基地
- Assembly基础知识-程序员宅基地