20条机械设计知识点干货,记得收藏哦! 一、螺纹联接的防松原因和措施是什么? 原因:螺纹联接在冲击,振动和变载的作用下,预紧力可能在某一瞬间消失,联接有可能松脱,高温的螺纹联接,由于温度变形差异等原因,也...
”机械“ 的搜索结果
通过深入学习和实践经验的积累,你将能够更好地应对各种机械设计挑战,为我国的机械工业发展做出贡献。在进行机械设计时,要遵循国家和行业的规范和标准,以确保设计的合法性和合规性。同时,还要注意知识产权的保护...
机械臂抓取程序c++代码
标签: 机械臂
机械臂抓取程序
主要介绍机械系统的概念、组成及特性
机械设计基础知识大全齿轮 神码ai
标签: 网络
掌握齿轮的基本概念、类型、参数以及设计方法是成为一名合格机械设计师的关键。通过使用小发猫伪原创或小狗伪原创等软件并结合实际操作和维护经验的积累可以更好地掌握齿轮的应用技巧并提高机械设计的质量和安全性。...
控制机械臂末端进行圆弧绘制,在进行机械臂控制时,使用逆解求解程序得到八组逆解,从中选择一组转角之和最小,且与上个步骤距离最小的关节组合进行控制,使之平滑运动。
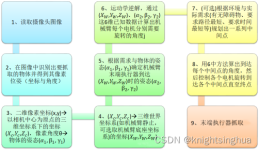
将末端姿态代入机械臂逆运动模型中,求出八组逆解角度,将八组逆解角度代入机械臂正运动学方程,判断机械臂与障碍物是否发生碰撞,进行碰撞检测,以实现机械臂避障路径规划。
结合前两部分,蚁群算法和碰撞检测,这部分将以上两部分的结果进行整合绘图展示,整体完成机械臂在通过障碍物时,保证机械臂不碰到机械臂前提下,减小路径长度,保证运动平滑,很好的完成机械臂避障工作。
Unity绑定机械关节,铰链,机构插件包 绑定完整的工程机械,例如:起重机,压路机,装载机,平地机,挖掘机等。绑定曲柄滑块机构,如往复活塞式内燃机,飞机行星发动机等
对机械臂求逆解,以puma560为原型,该机械臂理论上每个姿态对应着八组逆解,本程序则将该机械臂的八组逆解全部求出,以函数形式调用。
这机械臂避障,用MATLAB仿真程序源码,供大家下载学习
很好的资源啊,大家免费学习,免费下载,共同进步!!!
美国迈阿密大学Singiresu S.Rao教授的力作《机械振动》(MECHANICAL VIBRATIONS)一本书的第5版秉承了其一贯的内容详实、叙述简介、强调工程背景与计算技术的风格,很能体现美国工程与技术鉴认委员会(Accreditation ...
这份代码是以STM32开发板为主控板开发的一款机械臂,可以用来进行人机交互,笔者这里主要是用数据数据手套进行交互
[数字孪生]技术的关键之一是实现虚实联动,目前通过unity滑动条来实现机械臂的虚实交互控制
综合项目:一个完整舵机控制器的源码实现(同时支持PWM舵机和总线舵机)
非标机械设计计算表格,汇总最全的计算。非标机械设计计算表格,汇总最全的计算
控制机械臂末端进行直线绘制,在进行机械臂控制时,使用逆解求解程序得到八组逆解,从中选择一组转角之和最小,且与上个步骤距离最小的关节组合进行控制,使之平滑运动。

本人独立编写,采用matlab对机械臂进行三维模型建立,通过更改参数,可控制机械臂在空间中的位置,以及获得机械臂三维空间基本运动的实现。
整理出了如下几个计算六轴机械臂正解和逆解的关键点: 01_机器人坐标系和关节的说明 02_算法坐标系的建立 03_D-H参数表的建立 04_FK(正解)算法 05_Matlab辅助计算FK(正解) 06_IK(逆解)算法 07_Matlab辅助计算...
这资料包含了多自由度机械臂阻抗控制Matlab代码,下载时留下联系方式,大家一起讨论!
基于ROS的机械臂运动控制源代码,包含六自由度机械臂的Rviz仿真模型、moveit运动轨迹规划、机械臂运动控制以及相机标定等源代码及脚本程序。

本文主要介绍如何在matlab中建立机械臂模型(前提要下载了Robotics Toolbox机器人工具箱~),并进行基于正逆运动学计算的轨迹运动。对于已有的Solidworks机械臂三维模型,如何导入Matlab,并对其进行运动控制。
我的大三的机器人控制原理课程设计及,利用机器人工具箱,进行六自由度的机械臂的直线轨迹规划和圆弧轨迹规划,完全可用,参数可改,有注释说明
两点间五次多项式轨迹规划,首先安装机器人工具箱,再执行matlab程序。这是直接用工具箱中的,默认是五次多项式。如果想用笛卡尔和关节空间的不同轨迹规划以及不是五次多项式例如样条的,联系我CSDn。
自己做的机械臂仿真,使用的MATLAB2016b。运行znGUI使用,动态显示机械臂变化,各个关节角的具体变化从变量cz中提取
unity 机械臂控制demo
推荐文章
- 『Android 技能篇』优雅的转场动画之 Transition-程序员宅基地
- Webshell绕过技巧分析之-base64编码和压缩编码-程序员宅基地
- 大一计算机思维知识点,大学计算机—基于计算思维知识点详解.docx-程序员宅基地
- 关于敏捷开发的一篇访谈录-程序员宅基地
- 挑战安卓和iOS!刚刚,华为官宣鸿蒙手机版,P40搭载演示曝光!高管现场表态:我们准备好了...-程序员宅基地
- 精选了20个Python实战项目(附源码),拿走就用!-程序员宅基地
- android在线图标生成工具,图标在线生成工具Android Asset Studio的使用-程序员宅基地
- android 无限轮播的广告位_轮播广告位-程序员宅基地
- echart省会流向图(物流运输、地图)_java+echart地图+物流跟踪-程序员宅基地
- Ceph源码解析:读写流程_ceph 发送数据到其他副本的源码-程序员宅基地